| 横川 隆一 |  |
| ヨコガワ リュウイチ | |
| 生命医科学部医工学科 | |
| 博士後期課程教授 |
Last Updated :2025/08/28
研究者情報
researchmap
研究キーワード
研究分野
経歴
- 同志社大学 生命医科学部 教授, Faculty of Life and Medical Sciences, 2008年 - 現在
- 同志社大学 工学部 教授, 2002年 - 2008年
- 文部科学省知的クラスター創成事業 プロジェクトメンバー, 2002年 - 2006年
- 同志社大学大学院工学研究科博士課程(前期課程)教授, 2002年 - 2005年
- 同志社大学大学院工学研究科博士課程(後期課程)教授, 2005年 -
- 同志社大学大学院工学研究科博士課程(前期課程)助教授, 1998年 - 2002年
- 同志社大学 工学部 助教授, 1996年 - 2002年
- 同志社大学在外研究員(英国オックスフォード大学), 1998年 - 2000年
- 同志社大学 工学部 専任講師, 1991年 - 1996年
- 同志社大学 工学部 助手, 1989年 - 1991年
学歴
- 同志社大学, 工学研究科, 機械工学専攻博士課程後期課程退学, - 1989年
- 同志社大学, 工学研究科, 機械工学専攻博士課程前期課程, - 1988年
- 同志社大学, 工学部, 機械工学科, - 1986年
学位
所属学協会
論文
- Evaluation of the Clinical Utility of a Gait Analysis System Using Pose Estimation Techniques in Physical Therapy
Katsuhiko Nishizawa; Yu Oba; Kento Yamada; Ikumi Tanaka; Toru Tsumugiwa; Ryuichi Yokogawa; Tomoya Watanabe
2024 SICE International Symposium on Control Systems, SICE ISCS 2024, 107 - 112, 2024年03月, 研究論文(国際会議プロシーディングス) - Effects of Delayed Visual Feedback on Brain Activity: A Near-Infrared Spectroscopy Study
Kengo Somei; Toru Tsumugiwa; Ryuichi Yokogawa; Mitsuhiro Narusue; Hiroto Nishimura; Yusaku Takeda; Toshihiro Hara
2023 IEEE/SICE International Symposium on System Integration (SII), 2023年01月17日, 研究論文(国際会議プロシーディングス) - Gait Rehabilitation and Locomotion Support System Using a Distributed Controlled Robot System
Katsuhiko Nishizawa; Toru Tsumugiwa; Ryuichi Yokogawa
Journal of Robotics and Mechatronics, 34(1) 72 - 85, 2022年02月, 研究論文(学術雑誌) - アドミッタンス制御により駆動する歩行車の運動特性を考慮した起立-歩行動作解析
神谷 紀慶; 積際 徹; 横川 隆一
日本機械学会論文集, 一般社団法人 日本機械学会, 88(912) 22 - 00075, 2022年, 研究論文(学術雑誌) - Effect of Display Response Time on Brain Activity in Human–Machine Interface Commander Operation
Kentaro Oshima; Toru Tsumugiwa; Ryuichi Yokogawa; Mitsuhiro Narusue; Hiroto Nishimura; Yusaku Takeda; Toshihiro Hara
IEEE/RSJ International Conference on Intelligent Robots and Systems, 6181 - 6186, 2021年09月, 研究論文(国際会議プロシーディングス) - Gait Assessment on EMG and Trunk Acceleration with Impedance-Controlled Gait-Aid Walker-Type Robot
Shun Watanabe; Toru Tsumugiwa; Ryuichi Yokogawa
IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 1125 - 1130, 2020年07月, 研究論文(国際会議プロシーディングス) - Muscle and Brain Activations in Cylindrical Rotary Controller Manipulation with Index Finger and Thumb
Rio Okatani; Toru Tsumugiwa; Ryuichi Yokogawa; Mitsuhiro Narusue; Hiroto Nishimura; Yuusaku Takeda; Toshihiro Hara
IEEE International Conference on Robotics and Automation, 3806 - 3811, 2020年05月, 研究論文(国際会議プロシーディングス) - Gait Analysis of Walking Locomotion Enhanced by an Impedance-Controlled Gait-Aid Walker-Type Robot
Shun Watanabe; Toru Tsumugiwa; Ryuichi Yokogawa
Proceedings of the 2020 IEEE/SICE International Symposium on System Integration, SII 2020, 1187 - 1192, 2020年01月01日, 研究論文(国際会議プロシーディングス) - 人間-ロボット協調作業系における人間の運動特性と運動野の賦活状態に関する解析
積際 徹; 生田 涼; 横川 隆一
日本機械学会論文集, 一般社団法人 日本機械学会, 82(834) DOI:10.1299/transjsme.15-00095 - 15-00095, 2015年 - 垂直多関節型マニピュレータPA-10のコンプライアンス特性に関する解析
積際 徹; 小島 悠暉; 横川 隆一
日本機械学会論文集, 一般社団法人 日本機械学会, 81(828) DOI:10.1299/transjsme.15-00014 - 15-00014, 2015年 - Compliance measurement for the Mitsubishi PA-10 robot
Toru Tsumugiwa; Yasuhiro Fukui; Ryuichi Yokogawa
ADVANCED ROBOTICS, 28(14) 919 - 928, 2014年, 研究論文(学術雑誌) - 被歩行補助者の位置変位検出に基づく杖型歩行支援ロボットの運動制御法の開発
森多 隼也; 積際 徹; 横川 隆一
日本機械学会論文集C編, 一般社団法人 日本機械学会, 79(806) 3584 - 3596, 2013年10月 - 外界との接触状況検出機構を有する人とロボットの力学的協調システムの開発
井上 亮; 積際 徹; 横川 隆一
機械学会論文集C編, 一般社団法人 日本機械学会, 79(805) 2981 - 2991, 2013年09月 - 拘束空間におけるインピーダンス制御の安定化を実現する動特性調節器の設計・開発
入野 功輔; 積際 徹; 横川 隆一
機械学会論文集C編, 一般社団法人 日本機械学会, 79(802) 2048 - 2061, 2013年06月 - 人間とロボットの協調作業系における作業動特性の干渉制御を実現する動特性調節器の開発および評価
木下 敦之; 積際 徹; 横川 隆一; 木下 敦之; 積際 徹
日本機械学会論文集C編, 一般社団法人 日本機械学会, 79(808) 4705 - 4720, 2013年, 研究論文(学術雑誌) - 垂直多関節型マニピュレータPA-10の手先コンプライアンス特性のモデル設計に関する一考察
岡田 昌也; 積際 徹; 横川 隆一
設計工学会, 設計工学会 28 - 36, 2013年 - 人とロボットの協調位置決め作業における人の運動習熟に関する一考察
岡本 健太郎; 積際 徹; 横川 隆一
日本機械学会論文集C編, 一般社団法人 日本機械学会, 原著論文No.2013(JCR-0177) 2394 - 2407, 2013年 - 分散協調型移動支援ロボットシステム
横川 隆一; 積際 徹
日本ロボット学会誌, The Robotics Society of Japan, 28(9) 1077 - 1078, 2010年11月15日, 研究論文(学術雑誌) - Robot Motion Control Using Mechanical Load Adjuster with Motion Measurement Interface for Human-Robot Cooperation
Toru Tsumugiwa; Yuki Watanabe; Ryuichi Yokogawa
2009 IEEE-RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, 467 - 472, 2009年, 研究論文(国際会議プロシーディングス) - Development of Mechanical Load Adjusting Device with Motion Measurement Interface for Robotic Assistive Rehabilitation System
Toru Tsumugiwa; Yuki Watanabe; Ryuichi Yokogawa
2009 IEEE 11TH INTERNATIONAL CONFERENCE ON REHABILITATION ROBOTICS, VOLS 1 AND 2, (2009) 141 - +, 2009年, 研究論文(国際会議プロシーディングス) - Object Inherent Dynamics Based Motion Control in Human-Robot Cooperative Task System
Toru Tsumugiwa; Ryuichi Yokogawa
ICRA: 2009 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-7, (2009) 898 - 903, 2009年, 研究論文(国際会議プロシーディングス) - 運動学的作業方向動作精度に基づく冗長マニピュレータの姿勢評価・制御
甲斐 義弘; 横川 隆一
日本機械学会論文集 C編, 74(742) 1485 - 1492, 2008年06月 - ロボットマニピュレータの制御モード切り替え法に関する研究
山崎 容次郎; 横川 隆一; 積際 徹; 原 敬
日本機械学会論文集 C編, 74(740) 862 - 875, 2008年04月 - Position-detecting device for measurement of human motion in human-machine interaction
Toru Tsumugiwa; Atsushi Kamiyoshi; Ryuichi Yokogawa; Hiroshi Shibata
2007 IEEE/ASME INTERNATIONAL CONFERENCE ON ADVANCED INTELLIGENT MECHATRONICS, VOLS 1-3, 743 - +, 2007年, 研究論文(国際会議プロシーディングス) - Stability Analysis for Impedance Control of Robot in Human-Robot Cooperative Task System
Toru Tsumugiwa; Yasunori Fuchikami; Atsushi Kamiyoshi; Ryuichi Yokogawa; Kazunobu Yoshida
JOURNAL OF ADVANCED MECHANICAL DESIGN SYSTEMS AND MANUFACTURING, 1(1) 113 - 121, 2007年, 研究論文(学術雑誌) - Development of human motion detecting device for human-machine interface
Toru Tsumugiwa; Atsushi Kawyoshi; Ryuichi Yokogawa; Hiroshi Shibata
2006 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS, VOLS 1-3, 239 - +, 2006年, 研究論文(国際会議プロシーディングス) - Relationship between model parameters and fingertip manipulation of a tendon-muscle driven system model
Salvador Rivera Chequer; Ryuichi Yokogawa
2006 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS, VOLS 1-3, 1059 - +, 2006年, 研究論文(国際会議プロシーディングス) - 人間とロボットの協調作業系におけるロボットのインピーダンス制御の安定性解析に関する一考察
積際徹; 渕上康徳; 神吉厚之; 横川隆一; 吉田和信
日本機械学会論文集 C編, 71(707) 2267 - 2272, 2005年07月 - Stability Analysis for Impedance Control of Robot for Human-Robot Cooperative Task System
横川 隆一; T. Tsumugiwa; K. Yoshida
Proc. 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004 3883 - 3888, 2004年12月01日, 研究論文(国際会議プロシーディングス) - Manipulabilities of the index finger and thumb in three tip-pinch postures
R Yokogawa; K Hara
JOURNAL OF BIOMECHANICAL ENGINEERING-TRANSACTIONS OF THE ASME, 126(2) 212 - 219, 2004年04月, 研究論文(学術雑誌) - 人間とロボットによる協調運搬・精密はめあい(PEG-in-Hole)作業における一制御法
積際徹; 阪本敦; 横川隆一; 原敬
日本機械学会論文集C編, 一般社団法人日本機械学会, 70(689) 69 - 76, 2004年01月 - Simple indoor monitoring airship with a cross-allocated ultrasonic sensor
K Hagihara; M Miyagawa; N Nishino; H Shibata; R Yokogawa
PROCEEDINGS OF THE TENTH IASTED INTERNATIONAL CONFERENCE ON ROBOTICS AND APPLICATIONS, 212 - 215, 2004年, 研究論文(国際会議プロシーディングス) - 人間とロボットによる協調作業における人間の手先剛性の推定にもとづく可変インピーダンス制御(人間とロボットによる協調書道)
積際 徹; 横川 隆一; 原 敬
設計工学会, 38(4) 195 - 201, 2003年04月 - Measurement method for compliance of vertical-multi-articulated robot - Application to 7-DOF robot PA-10-
T Tsumugiwa; R Yokogawa; K Hara
2003 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-3, PROCEEDINGS, 69(688) 2741 - 2746, 2003年, 研究論文(国際会議プロシーディングス) - Measurement of distribution of maximum index-fingertip force in all directions at fingertip in flexion/extension plane
R Yokogawa; K Hara
JOURNAL OF BIOMECHANICAL ENGINEERING-TRANSACTIONS OF THE ASME, 124(3) 302 - 307, 2002年06月, 研究論文(学術雑誌) - Variable impedance control based on estimation of human arm stiffness for human-robot cooperative calligraphic task
T Tsumugiwa; R Yokogawa; K Hara
2002 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS I-IV, PROCEEDINGS, 2002 644 - 650, 2002年, 研究論文(国際会議プロシーディングス) - Construction of PC-based intelligent CAD system for cold forging process design - integration of CAD system and development of input method
S Sakamoto; T Katayama; R Yokogawa; T Kimura
JOURNAL OF MATERIALS PROCESSING TECHNOLOGY, 119(1-3) 58 - 64, 2001年12月, 研究論文(学術雑誌) - Variable impedance control with regard to working process for man-machine cooperation-work system
T Tsumugiwa; R Yokogawa; K Hara
IROS 2001: PROCEEDINGS OF THE 2001 IEEE/RJS INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-4, 3 1564 - 1569, 2001年, 研究論文(国際会議プロシーディングス) - 柔らかな物体に接触する関節形マニピュレータに対する位置と力の制御モードの一切換え法
山崎容次郎; 横川隆一; 原敬
同志社大学理工学研究報告, 同志社大学, 39(1) 21 - 32, 1998年, 研究論文(大学,研究機関等紀要)
MISC
- ステアリング操舵時の上肢姿勢解析に基づく手先コンプライアンス特性
杉本 帆乃香; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, RSJ2020AC3I1-02 , 2020年10月, 研究発表ペーパー・要旨(全国大会,その他学術会議) - HMIコマンダ回転操作における関節角度・表面筋電位計測に基づく示指・拇指のコンプライアンス特性解析
林 真優; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, RSJ2020AC2I3-05 , 2020年10月, 研究発表ペーパー・要旨(全国大会,その他学術会議) - つまみ回転操作時における示指・拇指のコンプライアンス特性に基づく指姿勢解析
伊藤 亮平; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, RSJ2020AC2I3-04 , 2020年10月, 研究発表ペーパー・要旨(全国大会,その他学術会議) - 手腕運動時の脳賦活・筋賦活に基づく操作性評価
横川隆一; 田中懐; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 287, 2017年 - 脳・筋賦活解析に基づく操作機器使用時の操作性評価
横川隆一; 山本洋介; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 26, 2017年 - 協調運搬作業における人どうしの相互作用が脳活動へ及ぼす影響
横川隆一; 中島詩惟; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 125, 2017年 - 機器操作に伴うバックラッシが操作性ならびに脳賦活・筋電位に与える影響
横川隆一; 杉浦和恵; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 118, 2017年 - 表面筋電位・踏力計測に基づくペダリング動作解析システムの評価
横川隆一; 阿部直也; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 117, 2017年 - 自転車競技選手のペダリング動作時における下肢筋群の筋活動に関する一考察
横川隆一; 藤田雅也; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 96, 2017年 - 示指・拇指によるつまみ回転操作時の運動特性
横川隆一; 米澤潤平; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 95, 2017年 - つまみ回転操作時における示指/拇指の指先力・指姿勢に関する研究
横川隆一; 平田樹; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 92, 2017年 - 歩行支援機器による歩行運動と歩容に関する研究
横川隆一; 中本沙良; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 88, 2017年 - 示指・拇指によるつまみ回転操作時の指先力特性
横川隆一; u; sub; 藤田咲良; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, 87, 2017年 - 示指と拇指のつまみ回転動作における指先力特性解析
横川隆一; 西村啓人; 積際徹; 横川隆一
日本機械学会 第30回バイオエンジニアリング講演会, RSJ2017AC1B2-05, 2017年 - インピーダンス可変機構を用いた人間とロボットの協調作業システムにおける安定解析
横川隆一; 内田智之; 神吉厚之; 積際徹; 横川隆一
第35回 日本ロボット学会 学術講演会, RSJ2017AC3G2-02, 2017年 - 両もち梁理論を用いた機械インピーダンス可変機構による人間とロボットの協調作業
横川隆一; 由良美帆; 神吉厚之; 積際徹; 横川隆一
第35回 日本ロボット学会 学術講演会, RSJ2017AC3G1-02, 2017年 - 両もち梁理論を用いたロボット装着型機械インピーダンス可変機構の開発・評価
横川隆一; 永田求; 神吉厚之; 積際徹; 横川隆一
第35回 日本ロボット学会 学術講演会, RSJ2017AC3G1-03, 2017年 - 操作機器が有するバックラッシが人間の生体情報に与える影響
横川隆一; 杉浦和恵; 積際徹; 横川隆一
第35回 日本ロボット学会 学術講演会, RSJ2017AC1G2-05, 2017年 - T字杖,四脚杖,ロフストランド杖を用いた歩容および下肢関節に関する解析
横川隆一; 谷口允紀; 積際徹; 横川隆一
第35回 日本ロボット学会 学術講演会, RSJ2017AC1B2-05, 2017年 - 自転車競技選手のペダリング動作における下肢筋群賦活に関する一考察
門田真弥; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 2G13 , 2017年 - 起立支援における被介護者の起立動作特性
清水康隆; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 2E+21 , 2017年 - 摩擦特性を付与した運動が筋賦活および運動野・体性感覚野に及ぼす影響
眞鍋奈津季; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 1G24 , 2017年 - 一輪型運搬支援機に搭載する電動ブレーキ機構の開発
足立梨絵; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 1E+15 , 2017年 - 作業対象が有する機械コンプライアンス値と人間の運動特性
ベルナール マエル耀平; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 1E+13 , 2017年 - KINECTを用いた下肢動作計測に基づく被介護者の動作解析
中西真理愛; 積際徹; 横川隆一
日本機械学会 第29回バイオエンジニアリング講演会, 1E+12 , 2017年 - Force analysis of the index finger and thumb in turning the cylindrical object
Hiroto Nishimura; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 275 - 278, 2017年 - Evaluation of mechanical impedance regulator mechanism in human-robot cooperative task system
Miho Yura; Atsushi Kamiyoshi; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 319 - 322, 2017年 - Effect of mechanical backlash on higher brain functions and surface potential signals
Kazue Sugiura; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 130 - 134, 2017年 - Force analysis of the index finger and thumb in turning the cylindrical object
Hiroto Nishimura; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 275 - 278, 2017年 - Effect of mechanical backlash on higher brain functions and surface potential signals
Kazue Sugiura; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 130 - 134, 2017年 - 機械的バックラッシが高次脳機能および筋賦活状態に及ぼす影響
杉浦和恵; 積際徹; 横川隆一
第34回 日本ロボット学会 学術講演会, RSJ2016AC3W3-05 , 2016年 - 人間とロボットの協調作業における機械インピーダンス可変機構の開発
永田求; 積際徹; 横川隆一
第34回 日本ロボット学会 学術講演会, RSJ2016AC2B2-01 , 2016年 - 人間-ロボット協調作業系における摩擦運動特性下での 筋賦活および高次脳機能解析
眞鍋奈津季; 積際徹; 横川隆一
第34回 日本ロボット学会 学術講演会, RSJ2016AC2B1-04 , 2016年 - T字杖,四脚杖,ロフストランド杖を用いた歩容ならびに免荷に関する解析
谷口允紀; 積際徹; 横川隆一
第34回 日本ロボット学会 学術講演会, RSJ2016AC1E2-02 , 2016年 - 機械的バックラッシを考慮した操作性に関する研究
杉浦和恵; 積際徹; 横川隆一
IEEE Metro Area Workshop in Kansai, 2016, P-20 , 2016年 - 介助動作における腰部屈曲角度の計測および作業姿勢評価システムの開発
中坊将士; 積際徹; 横川隆一
IEEE Metro Area Workshop in Kansai, 2016, P-19 , 2016年 - 支持免荷歩行訓練動作に基づく歩行支援ロボットの運動制御
坂田寛; 積際徹; 横川隆一
IEEE Metro Area Workshop in Kansai, 2016, P-18 , 2016年 - ロボットとの協調作業における人の運動特性・脳賦活状態と操作性評価に関する一考察
横尾 公哉; 積際 徹; 横川 隆一
同志社大学ハリス理化学研究報告, 同志社大学ハリス理化学研究所, 第57巻(第2号) 76 - 87, 2016年 - 2P1-N08 協調位置決め作業における移動動作及び位置決め動作の運動解析
横尾 公哉; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2P1 - N08(1)"-"2P1-N08(4)", 2015年05月17日 - 2P1-M09 人間とロボットの協調作業における動特性の可変制御機構の開発
小野 一樹; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2P1 - M09(1)"-"2P1-M09(4)", 2015年05月17日 - 2P1-M08 人どうしの協調運搬作業においてリーダ・フォロワ間の相互作用が高次脳機能へ及ぼす影響
大畑 真輝; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2P1 - M08(1)"-"2P1-M08(4)", 2015年05月17日 - 1P1-F03 表面筋電位および踏力計測に基づくペダリング動作解析システム
本元 泰穂; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "1P1 - F03(1)"-"1P1-F03(4)", 2015年05月17日 - 1P1-C08 介助動作における腰部屈曲角度の計測・解析システムの開発
中坊 将士; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "1P1 - C08(1)"-"1P1-C08(3)", 2015年05月17日 - 2P1-L02 被歩行補助者の状態推定に基づく歩行支援ロボットの運動制御
川端 一帆; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2P1 - L02(1)"-"2P1-L02(3)", 2015年05月17日 - 2P1-L07 人間-ロボット協調作業系において摩擦特性を付加した位置決め作業に関する高次脳機能評価
柴田 篤志; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2P1 - L07(1)"-"2P1-L07(3)", 2015年05月17日 - 2A2-T09 垂直多関節型マニピュレータPA-10のコンプライアンス特性についての解析
中田 雅也; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "2A2 - T09(1)"-"2A2-T09(4)", 2015年05月17日 - 1P1-X01 示指の筋腱駆動系モデルを用いた電気メススイッチの押下時における操作力特性の解析
大城 峻; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2015 "1P1 - X01(1)"-"1P1-X01(4)", 2015年05月17日 - 装着型力覚提示装置の可動範囲の拡大を実現する可変制御機構の開発(可変制御機構の設計開発と力覚提示状態の評価)
衣川 卓志; 森川 翔太; 積際 徹; 横川 隆一
日本機械学会論文集C編, DOI: 10.1299/transjsme.2014dr0265 , 2014年 - 装着型力覚提示装置の可動範囲の拡大を実現する可変制御機構の開発(可動範囲の広域化に対応した力覚提示手法の提案と評価)
森川 翔太; 積際 徹; 横川 隆一
日本機械学会論文集C編, DOI: 10.1299/transjsme.2014dr0234 , 2014年 - 装着型力覚提示装置の可動範囲の拡大を実現する可変制御機構の開発(可変制御機構の設計開発と力覚提示状態の評価)
衣川 卓志; 森川 翔太; 積際 徹; 横川 隆一; 衣川 卓志; 森川 翔太; 積際 徹
日本機械学会論文集C編, 一般社団法人 日本機械学会, 80(816) DOI: 10.1299/transjsme.2014dr0234 - DR0265, 2014年 - 装着型力覚提示装置の可動範囲の拡大を実現する可変制御機構の開発(可動範囲の広域化に対応した力覚提示手法の提案と評価)
森川 翔太; 積際 徹; 横川 隆一; 森川 翔太; 積際 徹
日本機械学会論文集C編, 一般社団法人 日本機械学会, 80(816) DOI: 10.1299/transjsme.2014dr0234 - DR0234, 2014年 - G151054 対象物への負荷軽減を考慮した箸型ロボットのモーションコントロール([G151-05]ロボティクスメカトロニクス部門,一般セッション(5))
山崎 容次郎; 摘際 徹; 横川 隆一
年次大会 : Mechanical Engineering Congress, Japan, 一般社団法人日本機械学会, 2013 "G151054 - 1"-"G151054-4", 2013年09月08日 - 2P1-O08 平面3 自由度ロボットの環境に作用する負荷を考慮した仕事制御とパワー制御(【機械力学・計測制御部門】ロボットシステムのダイナミクス&デザイン)
佐々木 将太; 山崎 容次郎; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2013 "2P1 - O08(1)"-"2P1-O08(4)", 2013年05月22日 - 外界との接触状況検出機構を有する人とロボットの力学的協調システムの開発
井上 亮; 積際 徹; 横川 隆一
日本機械学会論文集C編, 一般社団法人 日本機械学会, 原著論文No.2012(JCR-0238) 2981 - 2991, 2013年 - Development of the Walking-Support Robot Equipped with Force Detecting System
横川 隆一; Katsuhiko Nishizawa; Toru Tsumugiwa; Ryuichi Yokogawa
SICE Annual Conference 2013, 2696 - 2698, 2013年 - Development of Wearable Haptic Device Using Variable Structure Control for End Effector of Haptic Device
横川 隆一; Takashi Kinugawa; Toru Tsumugiwa; Ryuichi Yokogawa
SICE Annual Conference 2013, 279 - 281, 2013年 - 被歩行補助者の位置変位検出に基づく杖型歩行支援ロボットの運動制御法の開発
森多 隼也; 積際 徹; 横川 隆一
機械学会論文集C編, 一般社団法人 日本機械学会, 原著論文No.2013(JCR-0277) 3584 - 3596, 2013年 - 垂直多関節型マニピュレータPA-10の手先コンプライアンス特性のモデル設計に関する一考察
横川 隆一; 岡田 昌也; 積際 徹; 横川 隆一
設計工学会, 日本設計工学会, Vol.48(No.11(2013-11)) 514 - 522, 2013年 - Development of the Walking-Support Robot Equipped with Force Detecting System
YOKOGAWA Ryuichi; Katsuhiko Nishizawa; Toru Tsumugiwa; Ryuichi Yokogawa
SICE Annual Conference 2013, 2696 - 2698, 2013年 - Development of Wearable Haptic Device Using Variable Structure Control for End Effector of Haptic Device
YOKOGAWA Ryuichi; Takashi Kinugawa; Toru Tsumugiwa; Ryuichi Yokogawa
SICE Annual Conference 2013, 279 - 281, 2013年 - 1A2-V08 拘束空間におけるインピーダンス制御の安定化を実現するデバイスの設計・開発(人間機械協調(2))
入野 功輔; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2012 "1A2 - V08(1)"-"1A2-V08(4)", 2012年05月27日 - 3-DOFパラレルメカニズムを有する力覚提示装置の開発
谷口 嘉則; 積際 徹; 横川 隆一
日本機械学会論文集C編, The Japan Society of Mechanical Engineers, 原著論文No.2012(JCR-0237) 3228 - 3238, 2012年 - A48 腸頸靭帯炎を罹患した自転車競技選手のペダリング動作における下肢の運動解析(傷害・障害II)
福岡 法允; 積際 徹; 横川 隆一
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集 : symposium on sports and human dynamics, 一般社団法人日本機械学会, 2011 247 - 248, 2011年10月30日 - A37 指の機能的肢位と表面筋電位(計測・予測技術)
清 良彰; 積際 徹; 横川 隆一
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集 : symposium on sports and human dynamics, 一般社団法人日本機械学会, 2011 200 - 202, 2011年10月30日 - A36 MRI計測データを用いた示指の筋・腱駆動系のモデル化(計測・予測技術)
中谷 英嗣; 積際 徹; 横川 隆一
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集 : symposium on sports and human dynamics, 一般社団法人日本機械学会, 2011 196 - 199, 2011年10月30日 - 2A1-B09 人間-ロボット協調作業系におけるマンマシンインターフェイスの開発(人間機械協調)
井上 亮; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2011 "2A1 - B09(1)"-"2A1-B09(2)", 2011年05月26日 - 1201 画像計測を用いたVDT作業に対する瞬きの計測システム(GS-15・16 画像計測)
小島 右資; 横川 隆一; 積際 徹
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "12 - 1", 2011年03月19日 - 717 MRIを用いた示指のIPおよびMP関節軸のモデル化(GS-15 ロボット(2))
二見 奨太; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "7 - 17", 2011年03月19日 - 824 生体情報を用いたパワーアシストシステムの操作性評価(GS-12・15 生体情報利用)
中村 祐介; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "8 - 24", 2011年03月19日 - 825 小型情報端末操作時の母指の負担軽減用補助器具の有効性(GS-12・15 生体情報利用)
生信 愛; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "8 - 25", 2011年03月19日 - 716 垂直多関節型マニピュレータの関節コンプライアンスの定量評価(GS-15 ロボット(2))
藤田 卓; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "7 - 16", 2011年03月19日 - 719 MR画像データを用いた母指の静力学的モデルの作製(GS-15 ロボット(2))
松村 侑祐; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "7 - 19", 2011年03月19日 - 714 距離画像センサを用いた自律型搬送ロボットの制御(GS-15 ロボット(1))
渡 裕太郎; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2011(86) "7 - 14", 2011年03月19日 - 628 足底圧計測靴を用いた歩行支援ロボットによる二動作歩行時の患脚荷重調整方法の提案(GS-10 ロボット(2))
松永 直也; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2010(85) "6 - 28", 2010年03月16日 - 621 VBAを用いた筋力推定プログラムの作成およびそのプログラムを用いた筋緊張異常治療法の検証(GS-10 バイオメカニクス)
児玉 大地; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2010(85) "6 - 21", 2010年03月16日 - 627 分散型移動支援ロボットの性能評価と使用者の歩行能力に応じた制御(GS-10 ロボット(2))
横井 偉士; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2010(85) "6 - 27", 2010年03月16日 - 626 垂直多関節型マニピュレータPA10のコンプライアンスモデルの構築(GS-10 ロボット(2))
寺村 優; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2010(85) "6 - 26", 2010年03月16日 - 722 表面筋電位を用いた手先力推定に基づく力覚提示装置の制御法(GS-15 システム制御)
堀内 智之; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2010(85) "7 - 26", 2010年03月16日 - Grasp and Transport Control for a Chopsticks-type Robot Using Work Done on an Object
横川 隆一; Y. Yamasaki; T. Tsumugiwa; R. Yokogawa
2010 International Conference on Modelling, Identification and Control (ICMIC2010), 269 - 275, 2010年 - Grasp and Transport Control for a Chopsticks-type Robot Using Work Done on an Object
2010 International Conference on Modelling, Identification and Control (ICMIC2010), 269 - 275, 2010年 - 2A2-M13 携帯電話の親指キー入力操作における親指の操作性と大脳の賦活状態の関係
竹田 滋紀; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2009 "2A2 - M13(1)"-"2A2-M13(2)", 2009年05月25日 - 2A1-B02 パンチルトデバイスを用いた画像処理による部品外観検査システムの開発
行實 文明; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2009 "2A1 - B02(1)"-"2A1-B02(2)", 2009年05月25日 - 1P1-C21 パラレル機構を有する力覚および変位検出インターフェイスを用いたパワーアシストシステムの開発
篠原 弘毅; 積際 徹; 横川 隆一
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2009 "1P1 - C21(1)"-"1P1-C21(2)", 2009年05月25日 - 1A1-M03 MRIを用いた示指の筋・腱配置の静力学モデル
吉野 寛康; 横川 隆一; 積際 徹
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2009 "1A1 - M03(1)"-"1A1-M03(2)", 2009年05月25日 - 1321 胴体可変機構を有する4脚歩行ロボットの溝の跨ぎ越え(GS-15 ロボット(2))
藤井 康多; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 21", 2009年03月16日 - 1315 部品・製品搬送ロボットの設計及び制御(GS-15 ロボット(1))
町田 正臣; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 15", 2009年03月16日 - 1316 人間の上肢運動を補助する介護ロボットの開発(GS-15 ロボット(1))
高畑 光司; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 16", 2009年03月16日 - 1330 垂直多関節型マニピュレータの関節コンプライアンス同定(GS-15 ロボット・制御)
福井 康浩; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 30", 2009年03月16日 - 1324 画像情報を用いた繊維の欠陥認識システムの構築(GS-15 ロボット・画像処理)
中島 佳範; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 24", 2009年03月16日 - 1323 画像情報を用いた示指リンク長の推定(GS-15 ロボット・画像処理)
大西 立修; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 23", 2009年03月16日 - 1322 画像計測によるVDT作業者の着座姿勢の推定(GS-15 ロボット・画像処理)
柳本 寛之; 積際 徹; 横川 隆一
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2009(84) "13 - 22", 2009年03月16日 - 人間-ロボット間の相対運動情報検出機能を有する力伝達調整機構の開発
積際徹; 渡部 祐樹; 横川 隆一
ロボティクス メカトロニクス講演会, 2009, 一般社団法人日本機械学会, "1A2 - D14(1)"-"1A2-D14(3)", 2009年 - 1A1-D07 表面筋電位を力覚情報として用いたパワーアシストシステムの開発(人間機械協調)
山本 晋; 上野 友博; 積際 徹; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2008 "1A1 - D07(1)"-"1A1-D07(2)", 2008年06月06日 - 1A1-D03 作業対象物が持つ固有動特性を運動規範とする人間-ロボット協調作業システムの開発(人間機械協調)
積際 徹; 上野 友博; 山本 晋; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2008 "1A1 - D03(1)"-"1A1-D03(2)", 2008年06月06日 - 2A1-H06 示指の腱駆動モデルの動作シミュレーション(ワイヤ駆動系の機構と制御)
藤村 浩司; 積際 徹; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2008 "2A1 - H06(1)"-"2A1-H06(2)", 2008年06月06日 - 2A1-H17 人の示指リンク機構の運動学的特性(冗長自由度ロボット・メカニズム)
小川 智弘; 積際 徹; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2008 "2A1 - H17(1)"-"2A1-H17(2)", 2008年06月06日 - 211 作業対象物の持つ固有動特性を運動規範とする人間-ロボット協調作業システムの開発(OS-1・S-14・15・16・19 作業ロボット)
上野 友博; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "2 - 11", 2008年03月14日 - 1230 カム状支持機構による関節負荷低減装置の開発(GS-15 介護機構)
竹内 明宏; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 30", 2008年03月14日 - 1222 連動機構を用いた単軸駆動型の食事支援装置(GS-15 ロボット動作の制御)
服部 丈仁; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 22", 2008年03月14日 - 1217 パラレル機構を有する力覚及び変位検出インターフェイスを用いたパワーアシストシステム(GS-13・15 パラレルメカニズムの機構と制御)
岩田 淳一; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 17", 2008年03月14日 - 1223 MRIを用いた示指の筋・腱配置の運動学モデルの検討(GS-15 ロボット動作の制御)
八木 渉; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 23", 2008年03月14日 - 1224 胴体可変機構を持つ4足歩行ロボットによる斜面横断歩行(GS-15 ロボット動作の制御)
水野 正啓; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 24", 2008年03月14日 - 1227 衣服着脱時における姿勢保持支援機器の開発(GS-15 介護機構)
花井 敦; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "12 - 27", 2008年03月14日 - F4-5 人間とロボットの力学的な協調を実現するインピーダンス制御法 : 安全・安心社会を創生する介護・福祉ロボットの実現を目指して(F-4 安全・安心社会創生のための医工学技術開発)
積際 徹; 横川 隆一; 柴田 浩
計算力学講演会講演論文集, 一般社団法人日本機械学会, 2007(20) 48 - 49, 2007年11月25日 - 1A1-M08 力学的相互作用を伴う協調系における人間-ロボット間の相対運動情報に基づくロボットの運動制御法(人間機械協調)
積際 徹; 神吉 厚之; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2007 "1A1 - M08(1)"-"1A1-M08(3)", 2007年05月11日 - 1408 遺伝的アルゴリズムを用いた示指の指先操作性の評価(GS-15 ハンドと指)
福本 俊則; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 8", 2007年03月16日 - 1411 顔の位置・姿勢,瞳孔の位置および黒目部分の面積によるVDT作業者の視点推定アルゴリズム(GS-15 画像センサ応用)
小高 慶之; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 11", 2007年03月16日 - 1406 人間の食事動作を支援する小型ロボットマニピュレータの設計と制御(GS-15 マニピュレータ)
川島 健一; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 6", 2007年03月16日 - 1417 Bluetooth通信による携帯端末を用いた生体情報管理システムの構築(GS-15・16 ロボットシステム)
井爪 寛之; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 17", 2007年03月16日 - 1410 画像情報に基づいて遠隔操作した2指マニピュレータの操り実験(GS-15 ハンドと指)
山崎 直貴; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 10", 2007年03月16日 - 1413 画像処理による3次元位置計測を用いた携帯電話操作時の拇指の運動学的解析(GS-15 画像センサ応用)
寺阪 直人; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 13", 2007年03月16日 - 1401 胴体可変機構を持つ4足歩行ロボットの全方位歩行(GS-15 歩行)
倉下 直人; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 1", 2007年03月16日 - 1414 人と協調して動作するパワーアシスト移動マニピュレータの設計と制御(GS-15・16 ロボットシステム)
伊藤 賢; 積際 徹; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2007(82) "14 - 14", 2007年03月16日 - 510 特徴点認識による顔姿勢測定システムおよび黒目抽出を用いた瞬き検出システム(GS-15 ロボットビジョン)
小高 慶之; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 10", 2006年03月17日 - 507 超音波センサを用いた屋内用飛行船の制御(GS-15 ロボットコミュニケーションと障害物回避)
萩原 恒治; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 7", 2006年03月17日 - 512 複数のステレオビジョンを用いた距離計測法(GS-15 ロボットビジョン)
権 裕晶; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 12", 2006年03月17日 - 509 環境マップを利用した移動ロボットの経路計画(GS-15 ロボットコミュニケーションと障害物回避)
伊藤 まどか; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 9", 2006年03月17日 - 506 屋内ネットワーク環境を用いた人間-ロボット協調作業系におけるコミュニケーション(GS-15 ロボットコミュニケーションと障害物回避)
篠木 望; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 6", 2006年03月17日 - 501 仮想インピーダンスモデルに基づく多指ロボットハンドの操作力制御(GS-15 パワーアシストと生体信号の利用)
松岡 泰秀; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 1", 2006年03月17日 - 502 人間-ロボット協調作業系における仮想剛性項を用いたインピーダンス制御によるパワーアシストシステム(GS-15 パワーアシストと生体信号の利用)
神吉 厚之; 横川 隆一; 柴田 浩; 積際 徹
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 2", 2006年03月17日 - 518 分散型歩行支援ロボットの設計と制御(GS-15 移動ロボット)
宮本 昌和; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 18", 2006年03月17日 - 517 胴体可変機構を持つ4足歩行ロボットの段差歩進(GS-15 パラレルメカニズム)
飛田 一成; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 17", 2006年03月17日 - 515 3-DOFパラレルメカニズムを有する人の手首への力覚提示装置(GS-15 パラレルメカニズム)
恒吉 剛; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 15", 2006年03月17日 - 522 独立駆動2輪機構を有した低自由度移動マニピュレータによる人間ロボット協調作業(GS-15 移動ロボット)
尾崎 健太; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "5 - 22", 2006年03月17日 - 1011 MRIによる示指の筋・腱駆動系におけるモーメントアームの計測(GS-2 生体の力学)
恩地 良知; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "10 - 11", 2006年03月17日 - 1008 MRI計測に基づく屈曲・伸展の示指リンク機構の運動学モデル(GS-2 生体の力学)
安彦 敦夫; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2006(81) "10 - 8", 2006年03月17日 - C37 位置と力の偏差に基づく制御モード切換え法を用いた2指ロボットハンドの把持搬送制御(OS11-3 移動ロボットと制御理論)
山崎 容次郎; 津田 創; 横川 隆一
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人日本機械学会, 2005(9) 538 - 543, 2005年08月22日 - 1P1-N-065 人間とロボットの協調作業系におけるインピーダンス制御法を用いたパワーアシストシステム(人間機械協調1,生活を支援するロボメカ技術のメガインテグレーション)
神吉 厚之; 森川 寛也; 横川 隆一; 柴田 浩; 積際 徹
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2005 60 - 60, 2005年06月09日 - 1P1-N-064 可操作度に基づくSpoon-in-mouth協調作業における人とマニピュレータの相対的配置の決定(人間機械協調1,生活を支援するロボメカ技術のメガインテグレーション)
尾崎 健太; 恒吉 剛; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2005 60 - 60, 2005年06月09日 - 1P2-S-031 つまみ動作における双腕ロボットアームの位置-力制御(複数ロボットの協調制御,生活を支援するロボメカ技術のメガインテグレーション)
宮本 昌和; 横川 隆一; 柴田 浩
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2005 125 - 125, 2005年06月09日 - 1503 ニューラルネットによる移動ロボットの運動制約を考慮した障害物回避を伴う経路計画(GS-15 移動ロボット(1),研究発表講演)
若宮 崇; 横川 隆一; 柴田 浩
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2005(80) "15 - 5"-"15-6", 2005年03月18日 - 1015 位置と力の偏差に基づく制御モード切換え法を用いた2指ロボットハンドの把持搬送制御実験(ロボティクス・メカトロニクスIII)
山崎 容次郎; 津田 創; 横川 隆一
講演論文集, 一般社団法人日本機械学会, 2005(43) 383 - 384, 2005年02月24日 - H5 先端つまみ姿勢における人差し指と親指の運動学的特性(動作・指の解析)
横川 隆一
ジョイント・シンポジウム講演論文集:スポーツ工学シンポジウム:シンポジウム:ヒューマン・ダイナミックス, 一般社団法人日本機械学会, 2005 147 - 148, 2005年 - H6 姿勢計測に基づく人差し指リンク機構の解析(動作・指の解析)
横川 隆一
ジョイント・シンポジウム講演論文集:スポーツ工学シンポジウム:シンポジウム:ヒューマン・ダイナミックス, 一般社団法人日本機械学会, 2005 149 - 150, 2005年 - 126 可変剛性行列を有するコンプライアンス制御を用いた物体把持
辻内 伸好; 小泉 孝之; 植山 博文; 横川 隆一
Dynamics and Design Conference : 機械力学・計測制御講演論文集 : D & D, 一般社団法人日本機械学会, 2003 34 - 34, 2003年09月15日 - 人間-ロボット協調作業系におけるインピーダンス制御システムの安定性の解析 人間の反応時間の遅れおよびロボットのコンプライアンスを考慮した解析方法の提案
横川 隆一; 淵上康徳; 積際徹,原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 一般社団法人日本機械学会, 2003 43467 - 55, 2003年 - 3次元計測装置OPTOTRAK3020を用いた運動中における人間の上肢関節トルク計測システムの構築 人間とロボットの協調作業における人間の運動の定量的評価法の提案
横川 隆一; 北川岳史; 積際徹, 原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 2003 00-00 , 2003年 - 人間-ロボット協調作業系におけるロボットのインピーダンス制御/トルク制御の切り替え制御法 人間とロボットによる協調ボルト締結作業
横川 隆一; 川村幸太郎; 阪本敦; 積際徹,原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 一般社団法人日本機械学会, 2003 00-00 - 56, 2003年 - 双腕ロボットアームによる柔軟物の把持および運搬制御法に関する研究
横川 隆一; 石井照彦; 原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 一般社団法人日本機械学会, 2003 00-00 - 120, 2003年 - 3次元空間において障害物を回避する超音波センサを搭載した模型飛行船の提案
横川 隆一; 宮川正和; 原敬
システム制御情報学会研究発表講演会講演論文集, 47 185 - 186, 2003年 - 計測に基づく親指の機構解析
横川 隆一; 馬場丈典; 原敬
システム制御情報学会研究発表講演会講演論文集, 47 531 - 532, 2003年 - 人間とロボットによる協調作業における人間の手先剛性の推定に基づく可変インピーダンス制御(人間とロボットによる協調書道)
横川 隆一; 積際徹,原敬
設計工学, 38(4) 45 - 51, 2003年 - 多自由度を有する垂直多関節型ロボットのコンプライアンスの計測(7自由度を有するロボットPA-10 への適用)
横川 隆一; 積際徹; 横川隆一; 原敬
日本機械学会論文集(C編), 69(688) 3293 - 3300, 2003年 - 1P1-3F-C8 人間-ロボット協調作業系におけるインピーダンス制御システムの安定性の解析 : 人間の反応時間の遅れおよびロボットのコンプライアンスを考慮した解析方法の提案
渕上 康徳; 積際 徹; 横川 隆一; 原 敬
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2003 43467 - 55, 2003年 - 1P1-3F-D1 3 次元計測装置 OPTOTRAK3020 を用いた運動中における人間の上肢関節トルク計測システムの構築 : 人間とロボットの協調作業における人間の運動の定量的評価法の提案
北川 岳史; 積際 徹; 横川 隆一; 原 敬
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2003 00-00 - 56, 2003年 - Switching Control of Impedance Control/Torque Control for Human-Robot Cooperative Task(Human-Robot Cooperative Bolting Task)
2003 00-00 , 2003年 - A Study on Control Method to Grasp and Carry a Flexible Object by Dual Robot-Arm
2003 00-00 , 2003年 - Proposal of the Model Airship with the Ultrasonic Sensor System Avoids an Obstacle in 3-Dimensional Space
47 185 - 186, 2003年 - Human thumb analysis based on measurement
47 531 - 532, 2003年 - Switching control of Position/Torque control for human-robot cooperative task - Human-robot cooperative carrying and peg-in-hole task
T Tsumugiwa; A Sakamoto; R Yokogawa; K Hara
2003 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-3, PROCEEDINGS, 2003 1933 - 1939, 2003年 - 1212 拡張した位置と力の偏差に基づく制御モード切換え法を用いた 3 自由度ロボットの位置と力の制御
山崎 容次郎; 山崎 一之; 横川 隆一; 原 敬
講演論文集, 一般社団法人日本機械学会, 2002(40) 411 - 412, 2002年02月21日 - 816 人間とロボットによる Peg in hole 協調作業における可変インピーダンス制御 : ロボットの粘性および剛性を変化させるインピーダンス制御法の提案
阪本 敦; 積際 徹; 横川 隆一; 原 敬
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2002(77) "8 - 31"-"8-32", 2002年 - 817 人間-ロボット協調作業における布地状物体の協調運搬制御法 : 人間とロボットによるシーツ・タオルなどの協調運搬
戸塚 政裕; 積際 徹; 横川 隆一; 原 敬
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2002(77) "8 - 33"-"8-34", 2002年 - 828 走鳥類の二足歩行における脚姿勢の評価
原 敬; 横川 隆一; 河原 史朗
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2002(77) "8 - 55"-"8-56", 2002年 - VARIABLE IMPEDANCE CONTROL BASED ON ESTIMATION OF HUMAN ARM STIFFNESS FOR HUMAN-ROBOT COOPERATIVE TASK - Human-Robot Cooperative Calligraphic Task -
横川 隆一; Toru TSUMUGIWA; Ryuichi YOKOGAWA; Kei HARA
2002 The 6th International Conference on Motion and Vibration Control, 403 - 409, 2002年 - 三次元空間を認識するための超音波センサに関する研究
横川 隆一; 二宮義彰; 原敬; 渡辺好章
日本機械学会関西支部定時総会講演会講演論文集, 77(8) 57 - 58, 2002年 - 人間とロボットによるPeg in hole協調作業における可変インピーダンス制御に関する研究
横川 隆一; 阪本敦; 積際徹,原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 2002(3) 43467 , 2002年 - 人間とロボットの協調作業における人間の手先特性の推定にもとづく剛性項を用いた可変インピーダンス制御 人間とロボットによる協調ワイン注ぎ作業
横川 隆一; 積際徹, 原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 2002(3) 43467 , 2002年 - 人間とロボットによるシーツ・タオルなど柔軟物の協調運搬制御法
横川 隆一; 戸塚政裕; 積際徹, 原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 2002(3) 43467 , 2002年 - 人間とロボットの協調作業における人間の特性の推定にもとづく可変インピーダンス制御 食事を行うための協調スプーン・イン・マウス作業
横川 隆一; 石井照彦; 金子広幸; 積際徹, 原敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 一般社団法人日本機械学会, 2002(3) 43467 - 81, 2002年 - 位置と力の偏差に基づく制御モード切換え法を用いた弾性関節を有する平面3自由度ロボットの制御
横川 隆一; 山崎容次郎; 敬
日本機械学会ロボティクス・メカトロニクス講演会講演論文集, 2002(4) 43467 , 2002年 - 人間-ロボット協調作業系における仮想剛性項を用いた可変インピーダンス制御
横川 隆一; 積際徹, 原敬
日本機械学会年次大会講演論文集, 2002(1) 187 - 188, 2002年 - 多自由度を有する垂直多関節型ロボットPA-10のコンプライアンスの計測
横川 隆一; 積際徹, 原敬
日本ロボット学会学術講演会予稿集, 20 134 - 134, 2002年 - 並進・回転運動を伴う人間-ロボット協調運搬作業におけるロボットの制御法
横川 隆一; 積際徹,原敬
日本機械学会論文集(C編), 68(666) 483 - 490, 2002年 - VARIABLE IMPEDANCE CONTROL BASED ON ESTIMATION OF HUMAN ARM STIFFNESS FOR HUMAN-ROBOT COOPERATIVE TASK - Human-Robot Cooperative Calligraphic Task -
2002 The 6th International Conference on Motion and Vibration Control, 403 - 409, 2002年 - 829 三次元空間を認識するための超音波センサに関する研究
二宮 義彰; 横川 隆一; 原 敬; 渡辺 好章
関西支部講演会講演論文集, 一般社団法人日本機械学会, 77(8) 57 - 58, 2002年 - Variable impedance control with virtual stiffness for human-robot cooperative task - (Human-robot cooperative peg-in-hole task)
T Tsumugiwa; R Yokogawa; K Hara
SICE 2002: PROCEEDINGS OF THE 41ST SICE ANNUAL CONFERENCE, VOLS 1-5, 2002(3) 2329 - 2334, 2002年 - Variable Impedance Control with Stiffness Coefficient Based on Estimation of Human Arm Characteristic for Human-Robot Cooperative Task. Human-Robot Cooperative Pouring out Wine.
2002(3) 43467 , 2002年 - 2A1-L10 人間とロボットによるシーツ・タオルなど柔軟物の協調運搬制御法
戸塚 政裕; 積際 徹; 横川 隆一; 原 敬
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2002(3) 43467 - 81, 2002年 - Variable Impedance Control Based on Estimation of Human Characteristic for Human-Robot Cooperative Task. Cooperative Spoon in Mouth Task for Eating.
2002(3) 43467 , 2002年 - A Control of a Planar 3-DOF Robot with Elastic Joints Using a Method for Changing Control Mode Based on Potision and Force Errors.
2002(4) 43467 , 2002年 - Variable impedance control with virtual stiffness for human-robot cooperative peg-in-hole task
T Tsumugiwa; R Yokogawa; K Hara
2002 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-3, PROCEEDINGS, 2002(1) 1075 - 1081, 2002年 - Measurement for Compliance of Vertical-Multi-Articulated Robot PA-10
20 134 - 134, 2002年 - Control Method for Human-Robot Cooperative Carrying Task with Translation-Rotary Motion.
68(666) 483 - 490, 2002年 - Variable impedance control with virtual stiffness for human-robot cooperative peg-in-hole task
T Tsumugiwa; R Yokogawa; K Hara
2002 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-3, PROCEEDINGS, 2 1075 - 1081, 2002年 - Construction of PC-based intelligent CAD system for cold forging process design - integration of CAD system and development of input method
S Sakamoto; T Katayama; R Yokogawa; T Kimura
JOURNAL OF MATERIALS PROCESSING TECHNOLOGY, 119(1-3) 58 - 64, 2001年12月 - 人間とロボットによる協調作業における人間の手先剛性の推定にもとづく可変インピーダンス制御
横川 隆一; 積際徹, 原敬
日本ロボット学会学術講演会予稿集, 19 329 - 330, 2001年 - 人間とロボットによる協調作業における人間の手先剛性の推定にもとづく可変インピーダンス制御
横川 隆一; 積際徹, 原敬
日本ロボット学会学術講演会予稿集, 19 133 - 133, 2001年 - Measurement Method of Link Lengths of The Human Index Finger in The Flexion / Extension Movement
横川 隆一; K.Hara; R.Yukishima
The First International Symposium on Measurement, Analysis and Modeling of Human Functions, 1 475 - 480, 2001年 - 屈曲/伸展面内における示指の姿勢と指先力分布の計測
横川 隆一; 原敬
日本機械学会論文集(C編), 67(657) 1607 - 1612, 2001年 - Variable impedance control with regard to working process for man-machine cooperation-work system
T Tsumugiwa; R Yokogawa; K Hara
IROS 2001: PROCEEDINGS OF THE 2001 IEEE/RJS INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-4, 3 1564 - 1569, 2001年 - 筋骨格モデルを用いた指先操作力集合と筋力との静力学的関係の図式化
横川 隆一; 原敬
日本機械学会論文集(C編), 67(658) 1919 - 1925, 2001年 - Variable Impedance Control Based on Estimation of Human Arm Stiffness for Human-Robot Cooperative Task.
19 329 - 330, 2001年 - Measurement Method of Link Lengths of The Human Index Finger in The Flexion / Extension Movement
The First International Symposium on Measurement, Analysis and Modeling of Human Functions, 1 475 - 480, 2001年 - Measurement of Index Finger's Postures and Its Fingertip Force Distributions in the Flexion/Extension Plane
Ryuichi Yokogawa; Kei Hara
Nihon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Japan Society of Mechanical Engineers, Part C, 67(657) 1607 - 1612, 2001年 - Static-Related Diagraming between the Fingertip's Manipulating Force Set and the Muscle Forces Using a Musculoskeletal Model
Ryuichi Yokogawa; Kei Hara
Nihon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Japan Society of Mechanical Engineers, Part C, 67(658) 1919 - 1925, 2001年 - 719 運動方向に依存しない力制御の提案と1自由度マニピュレータによる検証実験(ロボ・メカIV)
山崎 容次郎; 横川 隆一; 原 敬
講演論文集, 一般社団法人日本機械学会, 5(1) 255 - 256, 2000年02月25日 - 人間の運動特性を考慮したニューラルネットワークを用いる自律車庫入れについて
横川 隆一; 鐘築輝; 原敬
同志社大学理工学研究報告, 同志社大学, 41(1) 69 - 75, 2000年 - 人間の運転特性を考慮したニューラルネットワークを用いる自律車庫入れについて
鐘築 輝; 原 敬; 横川 隆一
同志社大学理工学研究報告, 同志社大学, 41(1) 69 - 75, 2000年 - 複合加工に対応した冷間鍛造工程設計用インテリジェントCADシステムの開発
片山 傳生; 坂本 漱仁; 原 敬; 横川 隆一; 赤松 憲一; 木村 貴弘
塑性と加工, 日本塑性加工学会, 40(466) 1081 - 1085, 1999年11月 - Peg-in-hole 作業における最大挿入力に基づくマニピュレータの作業姿勢評価
横川 隆一; 甲斐義弘; 原敬; 井上善雄; 横川明
日本設計工学会誌, 日本設計工学会, 34(5) 165 - 172, 1999年 - 作業の方向性を考慮したマニピュレータの運動学的動作精度
横川 隆一; 甲斐義弘; 原敬; 横川明
日本機械学会論文集(C編), 65(630) 177 - 182, 1999年 - Peg-in-hole作業におけるマニピュレータの運動学的作業性能評価(Peg-in-hole作業における器用さ度の実験的検討)
横川 隆一; 甲斐義弘; 原敬; 井上善雄; 横川明
日本設計工学会誌, 日本設計工学会, 34(4) 116 - 122, 1999年 - Pig-in-hole作業における最大挿入力に基づくマニピュレータの作業姿勢評価
甲斐 義弘; 原 敬; 横川 隆一; 井上 喜雄; 横川 明
設計工学, 日本設計工学会, 34(5) 165 - 172, 1999年 - 作業の方向を考慮したマニピュレータの運動学的動作精度
甲斐 義弘; 原 敬; 横川 隆一; 横川 明
日本機械学会論文集. C編, 一般社団法人日本機械学会, 65(630) 177 - 182, 1999年 - Peg-in-hole作業に対するマニピュレータの運動学的作業性能評価 (Peg-in-hole作業における器用さ度の実験的検討)
甲斐 義弘; 原 敬; 横川 隆一; 井上 喜雄; 横川 明
設計工学, 日本設計工学会, 34(4) 116 - 122, 1999年 - 精密はめ合い作業の作業達成条件に基づくマニピュレータの運動学的機構設計(与えられた作業領域に対する最適リンク長の設計)
甲斐 義弘; 原 敬; 横川 隆一; 横川 明
日本機械学会論文集. C編, 一般社団法人日本機械学会, 64(626) 3868 - 3873, 1998年10月25日 - 精密はめ合い作業の作業達成条件に基づくマニピュレータの運動学的機構設計(与えられた作業領域に対する最適リンク長の設計)
横川 隆一; 甲斐義弘; 原敬; 横川明
日本機械学会論文集(C編), 64(626) 176 - 181, 1998年 - Peg-in-hole作業に対するマニピュレータの運動学的作業性能評価(面取り面上でのつまり現象回避条件を考慮した評価法)
横川 隆一; 原敬; 横川隆一; 甲斐義弘
日本機械学会論文集(C編), 一般社団法人日本機械学会, 64(608) 604 - 609, 1998年 - Kinematic Design of Manipulators Based on Conditions for a Successful Peg-in-hole Task
Transaction of the Japan Society of Mechanical Engineers C, 64(626) 176 - 181, 1998年 - Peg-in-hole作業に対するマニピュレータの運動学的作業性能評価 (面取り面上でのつまり現象回避条件を考慮した評価法)
原 敬; 横川 隆一; 甲斐 義弘
日本機械学会論文集. C編, 一般社団法人日本機械学会, 64(608) 604 - 609, 1998年 - A graphical method for evaluating static characteristics of the human finger by force manipulability
K Hara; R Yokogawa; A Yokogawa
1998 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-4, 2 1623 - 1628, 1998年 - バリ取り作業に対する油圧ショベルアームの作業性能評価
横川 隆一; 原敬; 甲斐義弘; Sundon Kan
日本設計工学会誌, 日本設計工学会, 32(7) 285 - 294, 1997年 - 油圧ショベルを用いたバリ取りロボットの軌道追従制御
横川 隆一; 原敬,Sundon Kan
日本機械学会論文集(C編), 63(608) 1287 - 1294, 1997年 - バリ取り作業に対する油圧ショベルアームの作業性能評価
原 敬; 横川 隆一; 甲斐 義弘; 姜 順童
設計工学, 日本設計工学会, 32(7) 285 - 294, 1997年 - Evaluation of task-performance of a manipulator for a peg-in-hole task
K Hara; R Yokogawa; Y Kai
1997 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION - PROCEEDINGS, VOLS 1-4, 1 600 - 605, 1997年 - Trajectory Tracking Control for Robotic Deburring Using Hydraulic Shovel
Transaction of the Japan Society of Mechanical Engineers C, 63(608) 1287 - 1294, 1997年 - 油圧ショベルを用いたバリ取りロボットの制御(第3報 : アームの目標軌道追従性の向上とバリ取り実験)
姜 順堂; 原 敬; 横川 隆一
同志社大学理工学研究報告, 同志社大学, 37(1) 13 - 33, 1996年07月 - 油圧ショベルを用いたバリ取りロボットの制御(第2報 : PID流量制御による グラインダの軌道制御)
原 敬; 横川 隆一; 姜 順童
同志社大学理工学研究報告, 同志社大学, 36(3) 17 - 35, 1996年01月 - Peg-in-hole作業における弾性要素を含むマニピュレータの運動学的評価
横川 隆一; 原敬; 甲斐義弘
日本機械学会論文集(C編), 62(594) 585 - 592, 1996年 - Kinematic Evaluation of a Manipulator Including Compliant Elements for a Peg-in-hole Task
Transactions of the Japan Society of Mechanical Engineers C, 62(594) 585 - 592, 1996年 - 同志社大学 工学部 機械システム工学科・エネルギー機械工学科 制御工学研究室
原 敬; 横川 隆一
システム/制御/情報 : システム制御情報学会誌 = Systems, control and information, 39(2) 91 - 91, 1995年02月 - 油圧ショベルを用いたバリ取りロボットの制御 : 第1報:ジョイント独立PD制御によるグラインダの位置制御
原 敬; 横川 隆一; 姜 順童
同志社大学理工学研究報告, 同志社大学, 35(3) 295 - 329, 1995年01月 - 冷間鍛造における工程設計のインテリジェントCADに関する研究-事例ベースおよび推論機構の分類
横川 隆一; 片山傳生; 赤松憲一; 横川隆一; 岡本,原敬
塑性と加工(日本塑性加工学会誌), 日本塑性加工学会, 36(408) 35 - 40, 1995年 - 冷間鍛造における工程設計のインテリジェントCADに関する研究 : 事例ベースおよび推論機構の分類II
片山 傳生; 赤松 憲一; 横川 隆一; 岡本 晃治; 原 敬
塑性と加工, 日本塑性加工学会, 36(408) 35 - 40, 1995年 - Kinematic evaluation of manipulator for peg-in-hole task
K HARA; R YOKOGAWA; Y KAI
PROCEEDINGS OF 1995 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-3, 1995(3) 970 - 975, 1995年 - Design of Manipulator Linkage Viewed from Task Achievement
横川 隆一; K.Hara; H.Matsuoka; Y.Kai
Proc.2nd Japan -France Congress on Mechatronics, 380 - 383, 1994年 - Design and Impedance Control of End-Effector for Peg-in-hole Assembly Task
横川 隆一; K.Hara
1994JAPAN-U. S. A Symposium on Flexible Automation, Kobe Japan, 1994 979 - 986, 1994年 - Design of Manipulator Linkage Viewed from Task Achievement
Proc.2nd Japan -France Congress on Mechatronics, 380 - 383, 1994年 - Design and Impedance Control of End-Effector for Peg-in-hole Assembly Task
1994JAPAN-U. S. A Symposium on Flexible Automation, Kobe Japan, 1994 979 - 986, 1994年 - PRECISION INSERTION BY HEURISTIC-SEARCH WITH FUZZY PATTERN-MATCHING
K HARA; R YOKOGAWA
JSME INTERNATIONAL JOURNAL SERIES III-VIBRATION CONTROL ENGINEERING ENGINEERING FOR INDUSTRY, 35(2) 201 - 206, 1992年06月 - A Knowledge Based Intelligent CAD System for Cold Forging Design Using Fuzzy Theory
横川 隆一; T.Hirai; T.Katayama; K.Akamatu; M.Ueda
Proc.of the 29th Int. MATADOR Conference, 29 75 - 82, 1992年 - Recognition of State in Peg-in-Hole by Fuzzy Schema
横川 隆一
J. of Advanced Automation Technology, 4(3) 134 - 139, 1992年 - 冷間鍛造における工程設計のインテリジェントCADに関する研究
横川 隆一; 平井恒夫; 原敬; 片山傳生; 赤松憲一; 上田稔
塑性と加工(日本塑性加工学会誌), 34(387) 428 - 435, 1992年 - A Knowledge Based Intelligent CAD System for Cold Forging Design Using Fuzzy Theory
Proc.of the 29th Int. MATADOR Conference, 29 75 - 82, 1992年 - Recognition of State in Peg-in-Hole by Fuzzy Schema
J. of Advanced Automation Technology, 4(3) 134 - 139, 1992年 - Intelligent CAD System for Cold Forging using Fuzzy Theory
Journal of the JSTP, 34(387) 428 - 435, 1992年 - ファジイスキーマを用いたReg-in-holeの状態認識
横川 隆一; 原敬
日本機械学会論文集(C編), 57(533), 1991年 - ファジイパターンマッチングを用いたセンサー情報の統合による立体図形の認識
横川 隆一; 原敬; 竹中幹雄
日本機械学会論文集(C編), 一般社団法人日本機械学会, 57(535) p818 - 825, 1991年 - APPLICATION OF FUZZY-REASONING TO PRECISION INSERTING OPERATION
K HARA; R YOKOGAWA
FUZZY SETS AND SYSTEMS, 39(2) 205 - 214, 1991年01月 - ファジイスキ-マを用いたpeg-in-holeの状態認識
原 敬; 横川 隆一
日本機械学会論文集 C編, 一般社団法人日本機械学会, 57(533) p124 - 129, 1991年 - Description of Contact States by Fuzzy Pattern Matching and Application to The Peg-in-Hole
横川 隆一; K.Hara; R. Yokogawa
Proc. of 1990 Japan-U.S.A. Symposium on Flexible Automation, 3 911 - 918, 1990年 - ファジィパターンマッチングを用いた発見法的探索による精密はめあい作業
横川 隆一; 原敬
日本機械学会論文集(C編), 一般社団法人日本機械学会, 56(532) 3294 - 3299, 1990年 - ファジィパターンマッチングを用いたセンサ情報の統合による立体図形の認識
横川 隆一
日本機械学会論文集(C編), 57(535) 818 - 825, 1990年 - SCARA形ロボットによる面取り面のない段付き穴への精密はめあい作業
横川 隆一; 原敬; 吉中秀一
日本機械学会論文集(C編), 一般社団法人日本機械学会, 56(523) p810 - 816, 1990年 - 言語的記述とファジィパターンマッチングを用いた接触状態遷移の認識
横川 隆一; 原敬
計測自動制御学会論文集, 計測自動制御学会, 26(11) p1299 - 1304, 1990年 - Description of Contact States by Fuzzy Pattern Matching and Application to The Peg-in-Hole
Proc. of 1990 Japan-U.S.A. Symposium on Flexible Automation, 3 911 - 918, 1990年 - ファジィパタ-ンマッチングを用いた発見法的探索による精密はめあい作業
原 敬; 横川 隆一
日本機械学会論文集 C編, 一般社団法人日本機械学会, 56(532) 3294 - 3299, 1990年 - Recognition of 3-D objects by sensor fusion using fuzzy pattern matching.
Transaction of the Japan Society of Mechanical Engineers C, 57(535) 818 - 825, 1990年 - SCARA形ロボットによる面取り面のない段付き穴への精密はめあい作業〔含 討論〕
原 敬; 横川 隆一; 吉中 秀一
日本機械学会論文集 C編, 一般社団法人日本機械学会, 56(523) p810 - 816, 1990年 - Recognition of Transition in Contact State by Linguistic Description and Fuzzy Pattern Matching
Transactions of the society of Instrument and control Engineers, 26(11), 1990年 - ファジィ制御を用いた面取り面のない精密はめあい作業
横川 隆一; 原敬; 吉中秀一
日本機械学会論文集(C編), 一般社団法人日本機械学会, 54(506) p2504 - 2508, 1988年 - ファジィ制御を用いた面取り面のない精密はめあい作業
原 敬; 横川 隆一; 吉中 秀一
日本機械学会論文集 C編, 一般社団法人日本機械学会, 54(506) p2504 - 2508, 1988年 - 機械インピーダンス可変機構の開発・評価
由良美帆; 積際徹; 横川隆一
第34回 日本ロボット学会 学術講演会, RSJ2016AC2B2-02 - 人間-ロボット協調作業系におけるロボットの位置/トルク制御の切り替え制御法(人間とロボットによる協調peg-in-hole作業)
横川 隆一; 積際徹; 阪本敦, 原敬
日本ロボット学会学術講演会予稿集, 20(1) 214 - 214 - ニューラルネットワークを用いたセンサ情報の統合による3次元物体の認識
横川 隆一; 原敬; 富永哲欣; 松山一雄
同志社大学理工学研究報告, 35(1) 113 - 127 - Grasp and Transport Control for a Chopsticks-type Robot Using Work Done on an Object
Y. Yamasaki; T. Tsumugiwa; R. Yokogawa
2010 International Conference on Modelling, Identification and Control (ICMIC2010), 269 - 275 - T字杖,四脚杖,ロフストランド杖の歩容に関する一考察
谷口允紀; 積際徹; 横川隆一
IEEE Metro Area Workshop in Kansai, 2016, P-21 - Transition of muscle contraction of lower limbs during cycling exercise
Masaya Fujita; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 279 - 282 - Switching Control of Position/Torque Control for Human-Robot Cooperative Task (Human-Robot Cooperative Peg-in-Hole Task)
20(1) 214 - 214 - Recognition of 3-dimensional Object by Sensor Fusion Using Neural Networks
The Science and Engineering Review of Doshisha University, 35(1) 113 - 127 - Grasp and Transport Control for a Chopsticks-type Robot Using Work Done on an Object
Y. Yamasaki; T. Tsumugiwa; R. Yokogawa
2010 International Conference on Modelling, Identification and Control (ICMIC2010), 269 - 275 - Transition of muscle contraction of lower limbs during cycling exercise
Masaya Fujita; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 279 - 282
書籍等出版物
- 高度マンマシンインターフェースと情報技術の応用展開 ‐けいはんな知的クラスターにおけるネオカデンプロジェクト 【監修 渡辺好章】
横川 隆一
シーエムーシー出版, 2009年, 145-157, 学術書 - 第3章自立支援ロボット
横川 隆一
高度マンマシンインターフェースと情報技術の応用展開, 2009年, 単著, 145-156, 学術書
講演・口頭発表等
- Effect of Display Response Time on Sense of Agency and Brain Activity During Human-machine Interface Device Operation
Michihisa Yamamoto; Toru Tsumugiwa; Ryuichi Yokogawa
IECON 2024 – 50th Annual Conference of the IEEE Industrial Electronics Society, 2024年11月06日, 2024年11月03日, 2024年11月06日, 口頭発表(一般) - 指先操作力の有無による示指屈曲・伸展における関節間あるいは筋腱間の協調関係の比較
吉田 峻輔; 積際 徹; 横川 隆一
第42回 日本ロボット学会 学術講演会, 2024年09月06日, 2024年09月05日, 2024年09月06日, 口頭発表(一般) - HMI デバイス操作時における表示遅延が自己主体感および操作性に与える影響
山本 倫久; 積際 徹; 横川 隆一
第42回 日本ロボット学会 学術講演会, 2024年09月06日, 2024年09月03日, 2024年09月06日 - 擬似三角行列構造に基づいた示指の筋腱駆動系のモデル化
山田祐哉; 横川 隆一; 積際 徹
第42回 日本ロボット学会 学術講演会, 2024年09月06日, 2024年09月03日, 2024年09月06日, 口頭発表(一般) - ステアリング操作によるターゲット追従タスクにおける上肢関節の協調関係
渡邉 和宏; 積際 徹; 横川 隆一
第42回 日本ロボット学会 学術講演会, 2024年09月05日, 2024年09月03日, 2024年09月06日, 口頭発表(一般) - 上肢装着型荷重支持アームに適用可能なアシスト力可変制御機構の開発
谷 直樹; 積際 徹; 横川 隆一
第41回 日本ロボット学会 学術講演会, 2023年09月14日, 2023年09月11日, 2023年09月14日, 口頭発表(一般) - 力学的協調作業を実現する協働ロボットの動特性が人間の脳・筋活動に与える影響
大石 夏輝; 積際 徹; 横川 隆一
第41回 日本ロボット学会 学術講演会, 2023年09月14日, 2023年09月11日, 2023年09月14日, 口頭発表(一般) - 擬似逆行列を用いた運動学解析に基づく示指DIP-PIP関節の連動関係
岩谷 将吾; 積際 徹; 横川 隆一
第40回 日本ロボット学会 学術講演会, 2022年09月08日, 口頭発表(一般) - 両端固定梁構造を用いた引張梁反力調整型アドミッタンス可変機構の開発
髙城 周作; 積際 徹; 横川 隆一
第40回 日本ロボット学会 学術講演会, 2022年09月06日, 口頭発表(一般) - 梁支点反力調整理論を用いた両端固定梁型アドミッタンス可変機構の開発
三好 輝; 髙城 周作; 積際 徹; 横川 隆一
第40回 日本ロボット学会 学術講演会, 2022年09月06日, 口頭発表(一般) - 歩行車使用時の被歩行補助者を対象とした画像によるモデルベース姿勢推定
西澤 克彦; 小屋松 裕馬; 積際 徹; 横川 隆一
第22回 システムインテグレーション部門講演会, 2021年12月16日, 口頭発表(一般) - 表面筋電位計測に基づくペダリング動作時の筋収縮様式提示システム
福田 愛美; 積際 徹; 横川 隆一
第22回 システムインテグレーション部門講演会, 2021年12月16日, 口頭発表(一般) - 人と人の協調運搬作業におけるリーダ・フォロワ間に生じる情報の非対称性が脳活動に与える影響
佐竹 俊祐; 積際 徹; 横川 隆一
第39回 日本ロボット学会 学術講演会, 2021年09月11日, 口頭発表(一般) - 慣性・粘性特性を有する機器操作時における筋活動および脳活動解析
村上 将功; 積際 徹; 横川 隆一
第39回 日本ロボット学会 学術講演会, 2021年09月10日, 口頭発表(一般) - 可変アドミッタンス制御を実現する制御入力調節機構の開発
柴田 凌輝; 積際 徹; 横川 隆一
第39回 日本ロボット学会 学術講演会, 2021年09月10日, 口頭発表(一般) - 力覚センサ検出力調整機構を用いた可変アドミッタンス制御に対する操作性評価
近藤 好; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第39回 日本ロボット学会 学術講演会, 2021年09月10日, 口頭発表(一般) - 力覚センサ検出力調整機構を用いた可変アドミッタンス制御下で実現する人間とロボットによる協調Peg-in-Hole作業
今柴 和奏; 積際 徹; 横川 隆一
第39回 日本ロボット学会 学術講演会, 2021年09月10日, 口頭発表(一般) - ステアリング操舵時における上肢姿勢が手先コンプライアンス特性に及ぼす影響
森岡 悠斗; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第39回 日本ロボット学会 学術講演会, 2021年09月10日, 口頭発表(一般) - HMIコマンダつまみ回転操作時における示指・拇指のコンプライアンス解析に基づく指先の運動特性評価
大岡 昂平; 積際 徹; 横川 隆一; 成末 充宏; 西村 啓人; 武田 雄策; 原 利宏
第39回 日本ロボット学会 学術講演会, 2021年09月09日, 口頭発表(一般) - 歩行車型歩行支援機の運動特性が被補助者の歩行動作に与える影響
槌野 太倫; 積際 徹; 横川 隆一
第39回 日本ロボット学会 学術講演会, 2021年09月09日, 口頭発表(一般) - HMIコマンダを用いた入力操作時における画面表示応答遅延が脳活動に及ぼす影響
染井 健吾; 積際 徹; 横川 隆一; 成末 充宏; 西村 啓人; 武田 雄策; 原 利宏
第39回 日本ロボット学会 学術講演会, 2021年09月09日, 口頭発表(一般) - つまみ回転操作時における示指・拇指のコンプライアンス特性に基づく指姿勢解析
伊藤 亮平; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, 2020年10月, 2020年10月, 2020年10月 - HMIコマンダ回転操作における関節角度・表面筋電位計測に基づく示指・拇指のコンプライアンス特性解析
林 真優; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, 2020年10月, 2020年10月, 2020年10月 - ステアリング操舵時の上肢姿勢解析に基づく手先コンプライアンス特性
杉本 帆乃香; 積際 徹; 横川 隆一; 成末 充宏; 武田 雄策; 原 利宏
第38回 日本ロボット学会 学術講演会, 2020年10月, 2020年10月, 2020年10月 - Stability analysis for human-robot cooperative task system with the variable impedance mechanism
Tomoyuki Uchida; Atsushi Kamiyoshi; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 2017年 - Effect of mechanical interaction between leader and follower on brain activations during human-human cooperative transportation task
Masaki Ohata; Toru Tsumugiwa; Ryuichi Yokogawa
AROB 22nd 2017, 2017年 - 協調位置決め作業における 移動動作及び位置決め動作の運動解析
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 人間とロボットの協調作業における動特性の可変制御機構の開発
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 人どうしの協調運搬作業においてリーダ・フォロワ間の相互作用が高次脳機能へ及ぼす影響
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 支持免荷歩行訓練動作に基づく歩行支援ロボットの運動制御
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 人間-ロボット協調作業系において摩擦特性を付加した位置決め作業に関する高次脳機能評価
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 被歩行補助者の状態推定に基づく歩行支援ロボットの運動制御
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 垂直多関節型マニピュレータPA-10 のコンプライアンス特性についての解析
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 示指の筋腱駆動系モデルを用いた電気メススイッチの押下時における操作力特性の解析
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 表面筋電位および踏力計測に基づくペダリング動作解析システム
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 介助動作における腰部屈曲角度の計測・解析システムの開発
横川 隆一
ロボティクス・メカトロニクス講演会2015, 2015年 - 二輪型運搬支援機を用いた運搬作業における作業者の身体的負担に関する一考察
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 二輪走行機構を有する運搬支援機の開発
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - インピーダンス制御されたロボットアーム手先に搭載する高剛性環境との接触機構
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 人とロボットの協調作業における力伝達量調節機構の運動制御
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 人間とロボットの協調作業における力伝達量調節機構の設計
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 人とロボットの協調作業における操作者の運動スキルに関する一考察
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 垂直多関節型マニピュレータPA-10のコンプライアンスモデルに関する一考察
横川 隆一
計測自動制御学会 システム・情報部門 学術講演会(SSI2013), 2013年 - 対象物への負荷軽減を考慮した箸型ロボットのモーションコントロール
横川 隆一
日本機械学会2013年度年次大会, 2013年 - 平面3自由度ロボットの環境に作用する負荷を考慮した仕事制御とパワー制御
横川 隆一
ロボティクス・メカトロニクス講演会2013, 2013年 - 力覚提示部位における拘束状態の可変制御を実現する装着型力覚提示装置の開発―力覚提示部位の姿勢変化に対応した制御法―
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - 力覚提示部位における拘束状態の可変制御を実現する装着型力覚提示装置の開発―力覚フィードバック制御のための力検出機構の構築―
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - スマートフォン片手操作時における拇指の可操作性評価
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - スマートフォン操作時の拇指の負担軽減補助器具の有効性
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - MRI を用いた示指の筋腱配置モデルにおける関節トルクの三次元解析
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - インピーダンス制御されたロボットアームに搭載する空気圧アクチュエータを用いた接触力制御システムの構築
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - 人間-ロボット協調作業系におけるエアシリンダを用いた接触力制御機構の開発
横川 隆一
第57回システム制御情報学会研究発表講演会(SCI'13), 2013年 - 人の自重を利用した直動昇降機構を有する持ち上げ運搬補助ロボットの開発
横川 隆一
第55回 自動制御連合講演会, 2012年 - 位置決め作業に対する補助力を付加した作業の操作性評価
横川 隆一
第55回 自動制御連合講演会, 2012年 - 家庭内における物体搬送のための自律型搬送ロボットの運動制御
横川 隆一
第55回 自動制御連合講演会, 2012年 - アームロボットPA10の手先位置におけるコンプライアンス特性評価
横川 隆一
第55回 自動制御連合講演会, 2012年 - 人の自重を利用した持ち上げ運搬補助ロボットの設計開発:1自由度アーム機構を有する操作インターフェイスの開発
横川 隆一
第55回 自動制御連合講演会, 2012年 - 位置決め作業支援が人とロボットの協調作業に及ぼす影響
横川 隆一
第55回 自動制御連合講演会, 2012年 - MRIを用いた示指の骨・筋・腱の図心位置の評価
横川 隆一
第55回 自動制御連合講演会, 2012年 - 腸脛靭帯炎を罹患した自転車競技選手のペダリング動作時における下肢動作解析システム
横川 隆一
第55回 自動制御連合講演会, 2012年 - 運動感覚に基づいた杖型歩行支援ロボットにおける操作部の位置決定
横川 隆一
第55回 自動制御連合講演会, 2012年 - 歩容推定と操作力による杖型歩行支援ロボットの運動制御
横川 隆一
第55回 自動制御連合講演会, 2012年 - キッチンスケール用計測モジュールを用いた歩行支援ロボットのための力覚検出インターフェースの開発
横川 隆一
第55回 自動制御連合講演会, 2012年 - MR画像データを用いた母指の静力学的モデルの作製
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 画像計測を用いたVDT作業に対する瞬きの計測システム
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 小型情報端末操作時の母指の負担軽減用補助器具の有効性
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 生体情報を用いたパワーアシストシステムの操作性評価
横川 隆一
関西支部第86期定時総会講演会, 2010年 - MRIを用いた示指のIPおよびMP関節軸のモデル化
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 垂直多関節型マニピュレータの関節コンプライアンスの定量評価
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 距離画像センサを用いた自律型搬送ロボットの制御
横川 隆一
関西支部第86期定時総会講演会, 2010年 - 機能性外装を有する上肢運動補助ロボットの制御法
横川 隆一
第28回 日本ロボット学会学術講演会, 2010年 - 上肢運動の補助を行うパワーアシストロボットの開発
横川 隆一
第28回 日本ロボット学会学術講演会, 2010年 - 画像処理を用いたガラス繊維巻回体の自動検査装置の開発
横川 隆一
第28回 日本ロボット学会学術講演会, 2010年 - 力伝達調節機構を有するマンマシンインターフェースの評価
横川 隆一
第28回 日本ロボット学会学術講演会, 2010年 - 示指の筋腱駆動系の工学モデルの検証
横川 隆一
第28回 日本ロボット学会学術講演会, 2010年 - 人間協調動作型パワーアシストロボットの開発~ヒトとロボットはいかに『協働』していくか?~
横川 隆一
第22回同志社大学けいはんな産学交流会, 2008年, 同志社大学京田辺キャンパス(京都府京田辺市) - 人間とロボットの共生・協働を実現する制御法の創成
横川 隆一
3rd Biomimetics Conference, Doshisha, 2007年, 同志社大学京田辺キャンパス(京都府京田辺市) - 人間とロボットの力学的な協調を実現するインピーダンス制御法~安全・安心社会を創生する介護・福祉ロボットの実現を目指して~
横川 隆一
日本機械学会 第20回計算力学講演会 CMD2007 JSME 20th Computational Mechanics Conference, 2007年, 同志社大学京田辺キャンパス(京都府京田辺市) - 3-DOFパラレルメカニズムを有する人の手首への力覚提示装置の開発と応用
横川 隆一
第25回 日本ロボット学会学術講演会, 2007年 - 人間とロボットの協調作業における操作部の動特性が作業に与える影響
横川 隆一
第25回 日本ロボット学会学術講演会, 2007年 - 人間-ロボット協調作業系において固有動特性を運動規範とする力学的相互作用の実現
横川 隆一
日本機械学会 第20回計算力学講演会, 2007年 - 分散型移動支援ロボットの制御
横川 隆一
第25回 日本ロボット学会学術講演会, 2007年 - 力学的相互作用を伴う協調系における人間-ロボット間の相対運動情報に基づくロボットの運動制御法
横川 隆一
ロボティクス・メカトロニクス講演会2007, 2007年 - マンマシンインターフェース機能を持つヒト上肢の運動情報検出デバイスの開発
横川 隆一
自動制御連合講演会, 2006年 - ヒューマンマシンインターフェース機能を有するヒトの運動検出デバイスの開発
横川 隆一
日本ロボット学会学術講演会, 2006年 - Impedance Control Strategy using Virtual Stiffness Term for Human-Robot Cooperative Task (Power Assistance in Carrying Heavy Object)
横川 隆一; A. Kamiyoshi; H. Shibata; T. Tsumugiwa
Proc. 36th International Symposium on Robotics, 2005年 - 人間-ロボット協調作業系におけるロボットの可変インピーダンス制御の安定性に関する一考察
横川 隆一
日本ロボット学会学術講演会, 2004年 - 可操作度の平均値を用いた協調作業における人とマニピュレータの相対的配置
横川 隆一
日本ロボット学会学術講演会, 2004年 - 人間とロボットの協調作業における仮想剛性項を用いたロボットのインピーダンス制御法
横川 隆一
日本ロボット学会学術講演会, 2004年 - 先端つまみにおける人差し指と親指の運動学的特性
横川 隆一
日本ロボット学会学術講演会, 2004年 - 人間-ロボット協調作業系におけるインピーダンス制御システムの安定性の解析 人間の反応時間の遅れおよびロボットのコンプライアンスを考慮した解析方法の提案
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2003年 - 3次元計測装置OPTOTRAK3020を用いた運動中における人間の上肢関節トルク計測システムの構築 人間とロボットの協調作業における人間の運動の定量的評価法の提案
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2003年 - 人間-ロボット協調作業系におけるロボットのインピーダンス制御/トルク制御の切り替え制御法 人間とロボットによる協調ボルト締結作業
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2003年 - 双腕ロボットアームによる柔軟物の把持および運搬制御法に関する研究
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2003年 - 3次元空間において障害物を回避する超音波センサを搭載した模型飛行船の提案
横川 隆一
システム制御情報学会研究発表講演会, 2003年 - 計測に基づく親指の機構解析
横川 隆一
システム制御情報学会研究発表講演会, 2003年 - 人間とロボットの協調作業における仮想剛性項を利用したロボットのインピーダンス制御法
横川 隆一
日本ロボット学会学術講演会, 2003年 - 拡張した位置と力の偏差に基づく制御モード切換え法を用いた3自由度ロボットの位置と力の制御
横川 隆一
日本機械学会中国四国支部総会, 2002年 - 人間とロボットによる協調作業における人間の手先剛性の推定にもとづく可変インピーダンス制御
横川 隆一
日本機械学会関西支部定時総会講演会, 2002年 - 人間とロボットによるPeg in hole協調作業における可変インピーダンス制御 ロボットの粘性および剛性を変化させるインピーダンス制御法の提案
横川 隆一
日本機械学会関西支部定時総会講演会, 2002年 - 人間-ロボット協調作業における布地状物体の協調運搬制御法 人間とロボットによるシーツ・タオルなどの協調運搬
横川 隆一
日本機械学会関西支部定時総会講演会, 2002年 - 走鳥類の二足歩行における脚姿勢の評価
横川 隆一
日本機械学会関西支部定時総会講演会, 2002年 - 三次元空間を認識するための超音波センサに関する研究
横川 隆一
日本機械学会関西支部定時総会講演会, 2002年 - 人間とロボットによるPeg in hole協調作業における可変インピーダンス制御に関する研究
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2002年 - 人間とロボットの協調作業における人間の手先特性の推定にもとづく剛性項を用いた可変インピーダンス制御 人間とロボットによる協調ワイン注ぎ作業
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2002年 - 人間とロボットによるシーツ・タオルなど柔軟物の協調運搬制御法
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2002年 - 人間とロボットの協調作業における人間の特性の推定にもとづく可変インピーダンス制御 食事を行うための協調スプーン・イン・マウス作業
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2002年 - 位置と力の偏差に基づく制御モード切換え法を用いた弾性関節を有する平面3自由度ロボットの制御
横川 隆一
日本機械学会ロボティクス・メカトロニクス講演会, 2002年 - 人間-ロボット協調作業系における仮想剛性項を用いた可変インピーダンス制御
横川 隆一
日本機械学会年次大会, 2002年 - 多自由度を有する垂直多関節型ロボットPA-10のコンプライアンスの計測
横川 隆一
日本ロボット学会学術講演会, 2002年 - 人間-ロボット協調作業系におけるロボットの位置/トルク制御の切り替え制御法(人間とロボットによる協調peg-in-hole作業)
横川 隆一
日本ロボット学会学術講演会, 2002年 - 人間とロボットによる協調作業における人間の手先剛性の推定にもとづく可変インピーダンス制御
横川 隆一
日本ロボット学会学術講演会, 2001年 - 運動方向に依存しない力制御の提案と1自由度マニピュレータによる検証実験
横川 隆一
日本機械学会中国四国支部総会, 2000年 - 人間-機械協調作業システムにおける可変インピーダンス制御に関する研究
横川 隆一
日本ロボット学会学術講演会, 2000年 - インピーダンス制御と拡張した位置と力の偏差に基づく制御モード切換え法を用いた1自由度マニピュレータの位置と力の制御
横川 隆一
日本ロボット学会学術講演会, 2000年
産業財産権
- 特許権
ロボットシステム、ロボットのインピーダンス制御方法
特開2004-358575 - 特許権
インピーダンス制御装置、およびインピーダンス制御プログラム
特開2004-223663 - 特許権
ロボット、インピーダンス制御ロボットシステム
特開2005-238421 - 特許権
操作部の変位検出機構
特開2006-252210 - 特許権
外部環境の検出機構、および、ロボット
特開2006-247787 - 特許権
ロボット、および、そのロボットとともに使用される携帯可能な記憶媒体
特開2006-198389 - 特許権
携帯端末用ベルトおよび携帯端末
特開2006-140575 - 特許権
携帯端末およびアダプタ
特開2006-024175 - 特許権
ロボットシステム
特開2007-98553 - 特許権
インピーダンス制御によって制御されるロボット
特開2007-75974 - 特許権
携帯端末用ベルトおよび携帯端末
特開2008-011576 - 特許権
携帯機器用装着具および携帯機器
特開2009-147992 - 特許権
携帯機器用装着具および携帯機器
特開2009-124652
共同研究・競争的資金等の研究課題
- 示指と母指によるダイヤル回転操作における示指の筋・腱伸展機構の機械的制御
横川 隆一
日本学術振興会, 科学研究費助成事業, 2023年04月 -2026年03月, 研究代表者, 基盤研究(C), 同志社大学 - 手先インピーダンス制御におけるアナトミートレインと骨格系との調和
横川 隆一
骨格系の姿勢(3次元運動計測)とアナトミートレイン(筋・腱・筋膜経路)の張力(表面筋電位計測)から器用な手先制御における骨格系および筋・腱・筋膜経路の力学的な役割を解明するために、人差し指と親指の指先つまみ(Tip-Pinch)と手首関節(手関節)によるダイヤルインターフェースの回転操作を具体的な計測対象として取り扱った。人差し指と親指の骨格・筋・腱・筋膜系の機械的特性と手首関節の特性の調和によって、指先つまみによる器用さが、どのように実現されているのかを調べた。人差し指と親指の指先つまみ姿勢を維持したまま、手首関節の曲げ伸ばし(屈曲・伸展)運動によって、ダイヤルを回転するように、被験者に教示した。研究計画調書1.(2)に従って、(計測1)において作業環境と手指接触力の計測を行うための計測環境を整えた。被験者に負担を強いることなく精度良く、そして効率的に指、手首関節、および腕の姿勢変化を計測するために、各関節の背側にマーカ一つを取り付けることとした(計測2)。(計測3)において、筋・腱・筋膜経路上、特に、人差し指と親指、さらに前腕の筋活動を表面筋電位で計測できるように筋および筋電位添付位置を検討した。構築された計測(計測1、2、3)システムによる実験を大学研究室の学生ボランティアを被験者として実施し、本研究課題におけるシステムの有効性を確認した。基本的な筋・腱・筋膜ネットワークを基に、上述の計測結果から、筋・腱・筋膜経路に基づくモデルの開発を進めており、令和3年度の完成を目指す。, 日本学術振興会, 科学研究費助成事業 基盤研究(C), 2020年04月 -2023年03月, 基盤研究(C), 同志社大学 - 逆運動学の不良設定問題に基づく小型ジャイロセンサを用いた介護姿勢の計測と評価
基盤研究(C)(一般), 2015年 -2017年, 競争的資金 - 形状形成問題に基づく分散協調型歩行支援ロボットの転倒防止制御
基盤研究(C)(一般), 2012年 -2014年, 競争的資金 - NIRSによる高次脳機能解析と擬似三角マトリクス構造に基づく指の筋腱駆動系の解析
基盤研究(B)(一般), 2009年 -2011年, 競争的資金 - 擬似三角構造マトリクスに基づいた人の筋・腱駆動系の静力学的解析
基盤研究(C)(一般), 2007年 -2008年, 競争的資金 - 姿勢計測に基づく人差し指リンク機構の解析
基盤研究(C)(一般), 2003年 -2004年, 競争的資金 - 平成25度試作品「腰痛防止対策プログラム」の現プロトタイプの改良
人にやさしい介護支援機器開発プロジェクト運営協議会, 人にやさしい介護支援機器開発プロジェクト運営協議会委託研究, 公的機関(文部科学省・日本学術振興会を除く)からの各種助成, 競争的資金 - 人にやさしい介護支援機器開発プロジェクト事業に係る介護動作計測等及び腰痛防止 姿勢センサの仕様書作成に係る助言・監修
人にやさしい介護支援機器開発プロジェクト運営協議会, 人にやさしい介護支援機器開発プロジェクト運営協議会委託研究, 公的機関(文部科学省・日本学術振興会を除く)からの各種助成, 競争的資金 - 手にやさしい小型携帯端末の形状デザイン
文部科学省, 知的クラスター創成事業, 文部科学省各種事業, 競争的資金 - ネオカデンにおけるロボット端末アーキテクチャの研究
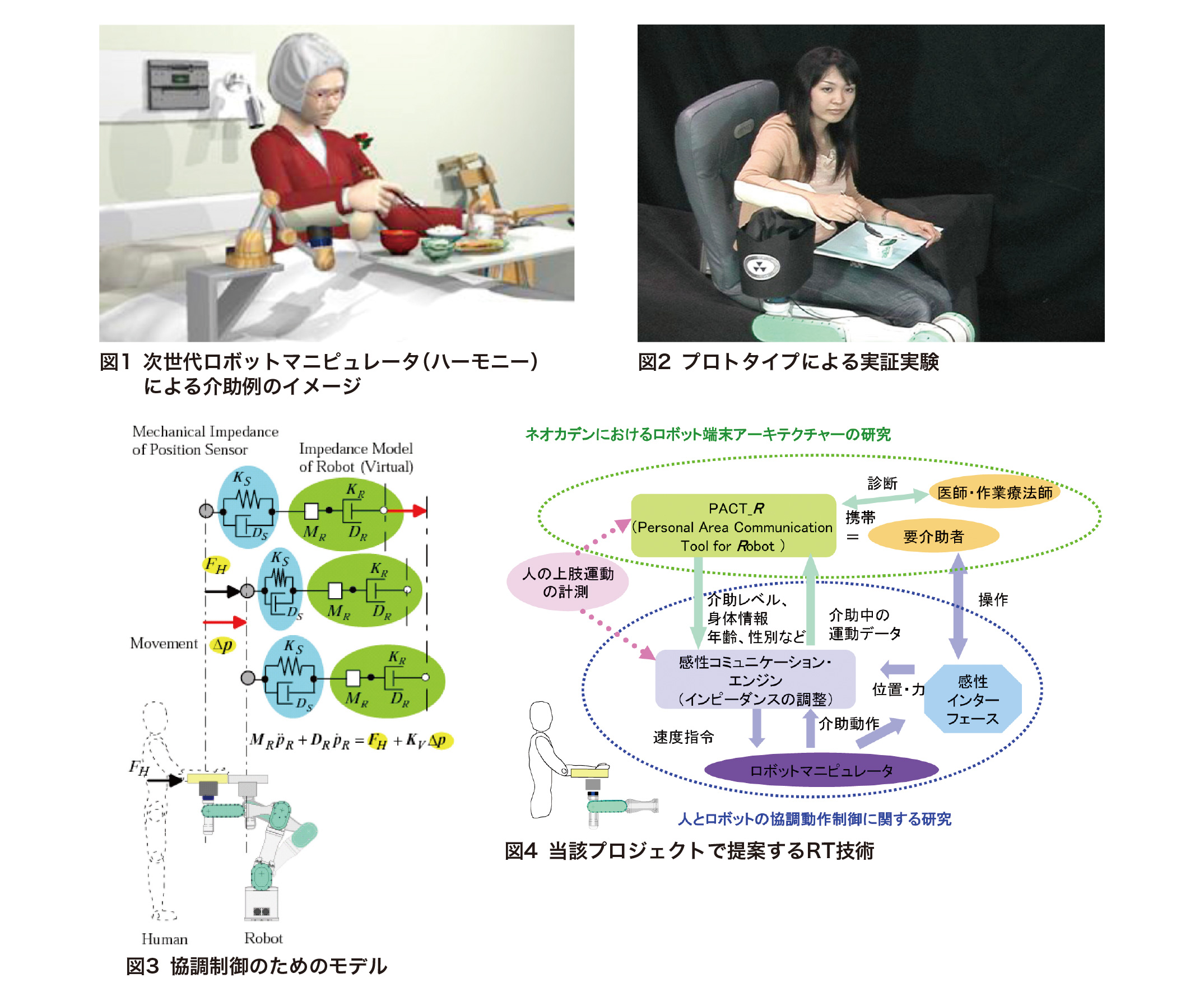
文部科学省, 知的クラスター創成事業, 文部科学省各種事業, 競争的資金 - 人とロボットの協調動作制御に関する研究
文部科学省, 知的クラスター創成事業, 文部科学省各種事業, 競争的資金 - Design of manipulator linkage on the object task
競争的資金 - Analysis of the human finger motion
競争的資金 - Force control of robot arm
競争的資金 - 作業対称に基づくロボットアームの機構設計
競争的資金 - 人の指の運動解析
競争的資金 - ロボットアームの力制御
競争的資金
コメント可能テーマ
研究シーズ
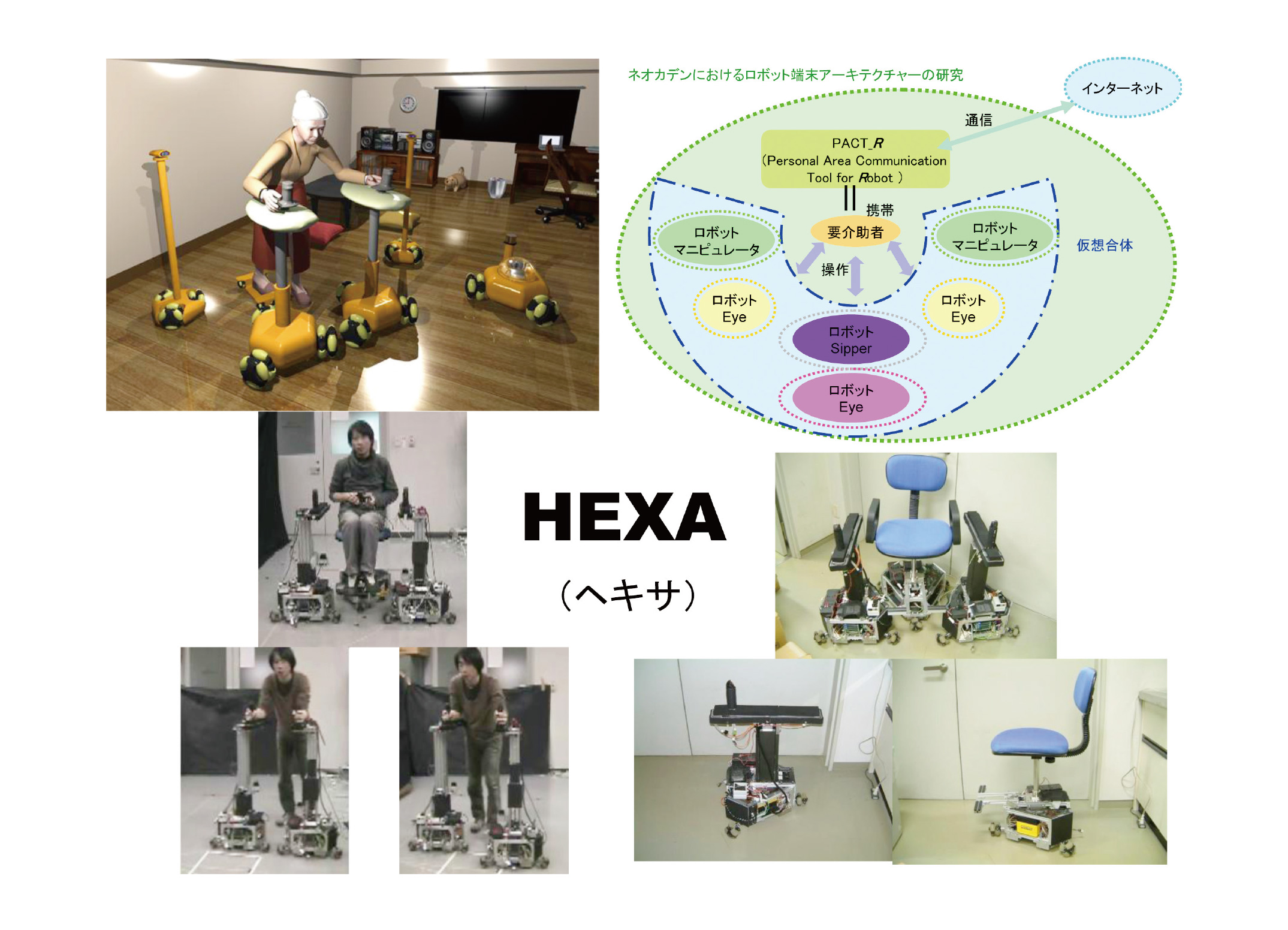
- 通信ネットワークを用いた 分散協調型運動支援ロボットシステムキーワード:通信:ネットワーク:歩行支援: リハビリテーション研究テーマの分野:情報・通信, 機械・ものづくり・計測機器, スポーツ・健康・福祉, 医療・創薬関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:ロボット単独の機能を単純化し、それらロボットをネットワーク環境下で協調制御することにより、使用者の身体状況に応じたロボットシステムの構築を目指す。使用用途、応用例等:歩行補助では、椅子ロボット(移動)、左右の手摺ロボット(移動と上下運動)、監視用カメラロボットなど単機能のロボットを使用者の歩行能力に応じて組み合わせる。移動時には、椅子ロボットおよび左右の手摺ロボットを協調制御することにより、電動車いすとして利用できる。さらにそれらを協調制御して立ち上がり補助にも利用できる。歩行中の運動補助としては、左右の手摺ロボットが利用できる。カメラロボットは、協調制御中の複数ロボット間および使用者との相対位置・運動を認識し、使用者の安全を見守る。備考:複数ロボットを機械的に一体化するのではなく、ネットワーク環境を利用して、それらロボットの運動を協調制御することにより、複数ロボットをバーチャルに合体させることが可能である。
 手にやさしい携帯電話形状デザインキーワード:携帯電話:PDA:操作性:親指:手:運動学研究テーマの分野:社会・文化・教育, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:運動学的な指先操作性に関する研究に基づく携帯電話の親指キー操作の3次元運動計測結果から、どのような相対位置にすれば携帯電話のキー操作性が改善されるのかを研究し、その研究結果を基に、親指キー入力操作に最適な携帯電話形状の設計、および既存の携帯電話に付加してキー入力時の親指疲労を軽減することができるアタッチメントの開発・試作を行っている。使用用途、応用例等:携帯電話のキー入力は親指1本による操作であり、親指とキーの相対位置が不適切なことから、メールを多用する人に親指の疲労障害が起こっている。キー入力操作に最適な携帯電話形状が設計できれば、親指の負担を減らすことが可能となり、キー入力に伴う親指疲労を軽減することができる。備考:本研究によって設計された携帯電話形状、およびアタッチメントは、運動学的な指先操作性の観点から、理論的な根拠を明確に持つと共に、実際の被験者のデータに基づいて設計されたものである。また、アタッチメントは既存の携帯電話に容易に取り付けられ、手にやさしい携帯電話の操作性が簡便に実現できる。
手にやさしい携帯電話形状デザインキーワード:携帯電話:PDA:操作性:親指:手:運動学研究テーマの分野:社会・文化・教育, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:運動学的な指先操作性に関する研究に基づく携帯電話の親指キー操作の3次元運動計測結果から、どのような相対位置にすれば携帯電話のキー操作性が改善されるのかを研究し、その研究結果を基に、親指キー入力操作に最適な携帯電話形状の設計、および既存の携帯電話に付加してキー入力時の親指疲労を軽減することができるアタッチメントの開発・試作を行っている。使用用途、応用例等:携帯電話のキー入力は親指1本による操作であり、親指とキーの相対位置が不適切なことから、メールを多用する人に親指の疲労障害が起こっている。キー入力操作に最適な携帯電話形状が設計できれば、親指の負担を減らすことが可能となり、キー入力に伴う親指疲労を軽減することができる。備考:本研究によって設計された携帯電話形状、およびアタッチメントは、運動学的な指先操作性の観点から、理論的な根拠を明確に持つと共に、実際の被験者のデータに基づいて設計されたものである。また、アタッチメントは既存の携帯電話に容易に取り付けられ、手にやさしい携帯電話の操作性が簡便に実現できる。 人間協調動作パワーアシストロボットキーワード:自立支援:力補助:運動補助:移動:ロボット研究テーマの分野:情報・通信, 機械・ものづくり・計測機器, 医療・創薬, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:家庭環境内にロボットを導入するには、ロボットが人間と協調して作業を行う必要がある。本研究開発では、次の三点が主たる課題と考える。 [1]人間とロボットとの間で生じる位置・力情報に基づいて、ロボットを人間の動作意図に協調させるための高度な制御法の開発 [2]実用的な家庭環境内ロボットを実現するために、[1]の制御法を効果的に適用できるロボット機構の基本設計 [3][1]の制御法を実現するために必要となる、人間とロボットとの間で生じる位置・力情報を検知するプリミティブで高度なインターフェースの開発
人間協調動作パワーアシストロボットキーワード:自立支援:力補助:運動補助:移動:ロボット研究テーマの分野:情報・通信, 機械・ものづくり・計測機器, 医療・創薬, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:家庭環境内にロボットを導入するには、ロボットが人間と協調して作業を行う必要がある。本研究開発では、次の三点が主たる課題と考える。 [1]人間とロボットとの間で生じる位置・力情報に基づいて、ロボットを人間の動作意図に協調させるための高度な制御法の開発 [2]実用的な家庭環境内ロボットを実現するために、[1]の制御法を効果的に適用できるロボット機構の基本設計 [3][1]の制御法を実現するために必要となる、人間とロボットとの間で生じる位置・力情報を検知するプリミティブで高度なインターフェースの開発 人の上肢運動に協調して 動作補助を行うロボットの開発キーワード:介護:福祉:ロボット:上肢:運動補助: 可変インピーダンス制御研究テーマの分野:情報・通信, 機械・ものづくり・計測機器, 医療・創薬, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:本研究の目的は、腕の筋力が弱った高齢者の上肢運動の補助、あるいは高齢者/脳卒中患者の上肢運動機能のリハビリテーションのための次世代ロボットマニピュレータ(Human motion Assisting Robot Manipulator ; HARMony、ハーモニー)(図1)を開発し、その実用化を目指すことである。使用用途、応用例等:多自由度を有する関節型マニピュレータが、要介助者の上肢を支えながら、要介助者の運動能力や動作意図に合わせて上肢の動きに追従し、安全に運動を補助できるロボット技術(RT)である。
人の上肢運動に協調して 動作補助を行うロボットの開発キーワード:介護:福祉:ロボット:上肢:運動補助: 可変インピーダンス制御研究テーマの分野:情報・通信, 機械・ものづくり・計測機器, 医療・創薬, スポーツ・健康・福祉関連研究者所属・研究者名:生命医科学部 医工学科、横川 隆一概要:本研究の目的は、腕の筋力が弱った高齢者の上肢運動の補助、あるいは高齢者/脳卒中患者の上肢運動機能のリハビリテーションのための次世代ロボットマニピュレータ(Human motion Assisting Robot Manipulator ; HARMony、ハーモニー)(図1)を開発し、その実用化を目指すことである。使用用途、応用例等:多自由度を有する関節型マニピュレータが、要介助者の上肢を支えながら、要介助者の運動能力や動作意図に合わせて上肢の動きに追従し、安全に運動を補助できるロボット技術(RT)である。