| 伊藤 彰人 |  |
| イトウ アキヒト | |
| 理工学部機械理工学科 | |
| 博士後期課程教授 |
Last Updated :2025/08/20
研究者情報
researchmap
研究キーワード
研究分野
経歴
- 同志社大学, 理工学部 機械理工学科, 教授, 2020年04月 - 現在
- 同志社大学, 理工学部エネルギー機械工学科, 准教授, 2014年04月 - 2020年03月
- 山梨大学, 大学院医学工学総合研究部 工学学域 機電情報システム工学系, 助教, 2012年04月 - 2014年03月
- 山梨大学 大学院医学工学総合研究部 情報システム工学系, 助教, 2008年04月 - 2012年03月
- 日本学術振興会 特別研究員, 2007年04月 - 2008年03月
学歴
学位
所属学協会
委員歴
- 研究調査部会 委員, 2019年06月 - 2023年05月, 公益社団法人日本設計工学会, 学協会
- 実行委員, 2020年09月 - , Dynamics and Design Conference 2020(D&D2020), 学協会
- LIFE2019 プログラム委員長, 2019年09月 -
- 実行委員, 2018年11月 - 2018年11月, スポーツ工学・ヒューマンダイナミクス2018, 学協会
- 機械力学・計測制御部門 運営委員, 2016年04月 - 2018年03月, 日本機械学会, 学協会
- 関東支部第20期商議員, 2013年04月 - 2014年03月, 日本機械学会, 学協会
- 生活生命支援医療福祉工学系学会連合大会2013 実行委員, 2013年09月 - 2013年09月, 学協会
- 関東支部第19期商議員, 2012年04月 - 2013年03月, 日本機械学会, 学協会
論文
- Development and operational verification of a lower limb rehabilitation device for preventing sarcopenia
Yusuke Imanishi; Nobutaka Tsujiuchi; Akihito Ito; Tomoya Mukai
MECHANICAL ENGINEERING JOURNAL, 2025年03月26日, 研究論文(学術雑誌) - Evaluation of piano performance based on motion analysis using inertial sensors
Yuta Usami; Keisuke Kitano; Yusaku Takehara; Akihito Ito; Nobutaka Tsujiuchi
MECHANICAL ENGINEERING JOURNAL, 2025年03月21日, 研究論文(学術雑誌) - Personalized estimating metabolic equivalents by an integration system of marker-less motion capture, portable 3D scanner and calculation of mechanical work
Masami Matsubara; Yasunari Watanabe; Yu Tamura; Akemi Nakagaki; Akihito Ito; Daiki Tajiri; Shozo Kawamura
Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2025年01月27日, 研究論文(学術雑誌) - Fundamental Study on Evacuation Guidance Assistance Robots in Disasters: A Measurement Method for Evacuation Routes Using 3D-LiDAR
Zixuan Zhang; Hirosuke Horii; Nobutaka Tsujiuchi; Akihito Ito
International Journal of Safety and Security Engineering, 14(2) 341 - 349, 2024年04月, 研究論文(学術雑誌) - Analysis and Clustering of Upper Limb Motion during the Hand Dexterity Pegboard Test using Inertial Sensor Systems.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi; Takuya Hashimoto
Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society. Annual International Conference, 2023 1 - 4, 2023年07月, 研究論文(学術雑誌) - Study on Fluctuation in the Spectrums of Torque Data During Golf Swing Due to the Mass Difference of Golf Club Shafts
Kosuke Okazaki; Nobutaka Tsujiuchi; Akihito Ito; Masahiko Ueda; Yuto Nakamura
Journal of Vibration Engineering and Technologies, 2023年, 研究論文(学術雑誌) - リターンマップを用いた車両駆動系の非線形振動解析
山梶 喜弘; 辻内 伸好; 伊藤 彰人
自動車技術会論文集, 53(6) 1212 - 1218, 2022年11月 - Three-dimensional strain evaluation of short-fiber-reinforced natural rubber using micro X-ray computed tomography
M. Matsubara; S. Teramoto; T. Komatsu; S. Furuta; M. Kobayashi; S. Kawamura; A. Nagatani; N. Tsujiuchi; A. Ito
Polymer Testing, 111, 2022年07月, 研究論文(学術雑誌) - Analysis of Dexterity Motion by Singular Value Decomposition for Hand Movement Measured Using Inertial Sensors.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi
Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society. Annual International Conference, 2021 7136 - 7139, 2021年11月, 研究論文(学術雑誌) - VALIDATION OF TRAVEL SIMULATION MODEL FOR A CRAWLER EXCAVATOR AND INFLUENCE OF VEHICLE POSTURE ON TRAVELING BEHAVIOR
Takumi Aoki; Nobutaka Tsujiuchi; Akihito Ito; Hirokazu Kohara; Hiroaki Ando
Proceedings of the 20th International and 9th Americas Conference of the International Society for Terrain-Vehicle Systems, ISTVS 2021, 2021年, 研究論文(国際会議プロシーディングス) - Assist Timing Decision Method for Wire Type Walking Assist Suit by Hip Joint Angular Acceleration
J.Zhang; H.Murai; A.Ito; N.Tsujiuchi; T.Inoue; K.Murakami; F.Hanzawa; K.Kishimoto; J.Ozawa
Proceedings of 2020 IEEE 9th Global Conference on Consumer Electronics, 795 - 798, 2020年10月, 研究論文(国際会議プロシーディングス) - Effect of Fiber Orientation on Nonlinear Damping and Internal Microdeformation in Short-Fiber-Reinforced Natural Rubber
M. Matsubara; S. Teramoto; A. Nagatani; S. Kawamura; N. Tsujiuchi; A. Ito; M. Kobayashi; S. Furuta
Experimental Techniques, 45(1) 37 - 47, 2020年, 研究論文(学術雑誌) - Evaluation of adaptive evacuation guide sign by using enlarged evacuation simulation at an actual floor plan of underground area
Yusuke Kasahara; Akihito Ito; Nobutaka Tsujiuchi; Hirosuke Horii; Keisuke Kitano
International Journal of Safety and Security Engineering, 10(1) 35 - 40, 2020年, 研究論文(学術雑誌) - Hand Motion Measurement using Inertial Sensor System and Accurate Improvement by Extended Kalman Filter
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi
Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, 6405 - 6408, 2019年07月, 研究論文(国際会議プロシーディングス) - Fundamental study of an adaptive evacuation guide sign by using a discrete element method-based simulation
Hirosuke Horii; Akihito Ito; Nobutaka Tsujiuchi; Takahiro Fukuda; Yusuke Kasahara
WIT Transactions on Engineering Sciences, 125 143 - PI-150, 2019年, 研究論文(国際会議プロシーディングス) - ゴルフスイングにおける軌道を生成する協調動作の分析
松本 賢太; 辻内 伸好; 伊藤 彰人; 小林 宏; 植田 勝彦; 岡崎 弘祐
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2019 B-27 , 2019年 - Hand Motion Measurement using Inertial Sensor System and Accurate Improvement by Extended Kalman Filter.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi
41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society(EMBC), 6405 - 6408, 2019年, 研究論文(国際会議プロシーディングス) - 慣性センサを用いた前腕および手指運動計測システムの開発
北野 敬祐; 伊藤 彰人; 辻内 伸好
設計工学, 公益社団法人 日本設計工学会, 54(4) 231 - 244, 2019年, 研究論文(学術雑誌) - Muscle activity coordination of upper limbs, trunk, and lower limbs during bipedal and quadrupedal walking in the Japanese macaque
Hiroko Oshima; Shinya Aoi; Katsumi Nakajima; Yasuo Higurashi; Tetsuro Funato; Nobutaka Tsujiuchi; Akihito Ito; Kazuo Tsuchiya
2nd International Symposium on Embodied-Brain Systems Science, P18 , 2018年12月05日, 研究論文(国際会議プロシーディングス) - Interfacial observation of composite rubber with fiber-shaped particles under tensile load using X-ray computer tomography
Masami MATSUBARA; 〇Shinnosuke TERAMOTO; Asahiro NAGATANI; Shozo KAWAMURA; Tomohiko ISE; Nobutaka TSUJIUCHI; Akihito ITO
Interfacial observation of composite rubber with fiber-shaped particles under tensile load using X-ray computer tomography, 2018年11月, 研究論文(国際会議プロシーディングス) - 伝達経路解析に基づいた振動応答に対する構造物の寄与評価
森辰宗; 製鋼所; 藤本淳志; 辻内伸好; 伊藤彰人; 本家浩一
日本機械学会論文集, 84(865) 1 - 12, 2018年08月 - クラブ設計を目的とした特異値分解によるゴルフスイングの動作分析
松本賢太; 辻内伸好; 伊藤彰人; 大島裕子; 植田勝彦; 岡崎弘祐
設計工学, 公益社団法人 日本設計工学会, 53(6) 447 - 462, 2018年06月, 研究論文(学術雑誌) - 装着型運動計測装置を用いた痙性不全麻痺歩行特性の定量評価
西山智士; 辻内伸好; 伊藤彰人; 足立渡(テック技販; 纐纈俊昭; テック技販; 禰占哲郎(ケアリング
同志社大学ハリス理化学研究報告, 59(1) 13 - 24, 2018年04月 - 特異値分解を用いたゴルファーのスイング分析
松本 賢太; 辻内 伸好; 伊藤 彰人; 植田 勝彦; 岡崎 弘祐; 古川 和樹
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2018 C-24 , 2018年 - Modeling of Hand and Forearm Link using Inertial Sensors.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi
40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC 2018, Honolulu, HI, USA, July 18-21, 2018, 3934 - 3937, 2018年, 研究論文(国際会議プロシーディングス) - 油圧ショベルの操作コントローラ開発のための油圧システムの同定
吉田達哉; 辻内伸好; 伊藤彰人; 鞍谷文保; 安藤博昭; キャタピラージャパン; 青柳多慶夫; ネオリウム・テクノロジー; 村山栄治; ネオリウム・テクノロジー; 荒井邦晴; ネオリウム・テクノロジー
計測自動制御学会論文集, 計測自動制御学会 ; [1965]-, 53(10) 557 - 563, 2017年10月 - Construction of Sound Source Model for Diesel Engine Using New Method for Selecting Optimal Field Points in Inverse-Numerical Acoustic Analysis
Nobutaka Tsujiuchi; Masahiro Akei; Akihito Ito; Daisuke Kubota; Koichi Osamura
SAE Technical Papers, 2017-(June), 2017年06月05日, 研究論文(国際会議プロシーディングス) - 連載講座センサ技術の最新の動向第16回慣性センサによる人体運動計測
伊藤彰人; 辻内伸好
電気評論, 電気評論社, 102(6) 57 - 61, 2017年06月 - 個別要素法を用いた避難誘導シミュレーション
福田貴大; 伊藤彰人; 辻内伸好; 堀井宏祐
第23回交通流と自己駆動粒子径シンポジウム論文集,, 91 - 94, 2017年04月 - Spatial and temporal correlation of muscle synergies in human walk-run transition.
Hiromune Takahashi; Hiroko Oshima; Shinya Aoi; Tetsuro Funato; Nobutaka Tsujiuchi; Akihito Ito; Kazuo Tsuchiya
International Symposium on Micro-NanoMechatronics and Human Science, MHS 2017, Nagoya, Japan, December 3-6, 2017, IEEE, 1 - 5, 2017年 - 逆音響解析における最適な観測点選定のための評価関数の提案
明井政博; ヤンマー; 辻内伸好; 久保田大介; 伊藤彰人; 山内貴之
日本機械学会論文集, 82(837) 1 - 13, 2016年05月 - Kinematic analysis of low dimensional structure in walking and running
Shuntaro Ishiduka; Hiroko Oshima; Shinya Aoi; Tetsuro Funato; Nozomi Tomita; Nobutaka Tsujiuchi; Akihito Ito; Kazuo Tsuchiya
2015 International Symposium on Micro-NanoMechatronics and Human Science, MHS 2015, 1 - 6, 2016年03月21日, 研究論文(国際会議プロシーディングス) - Estimation of joint center and measurement of finger motion by inertial sensors.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi; Shigeru Wakida
38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC 2016, Orlando, FL, USA, August 16-20, 2016, 5668 - 5671, 2016年, 研究論文(国際会議プロシーディングス) - 空間充填計画による逆音響解析のための計測点配置
大島 裕子; Hilmi Bin; Hela Ladin; 明井 政博; 伊藤 彰人; 辻内 伸好; 小泉 孝之
設計工学, 公益社団法人 日本設計工学会, 51(9) 644 - 658, 2016年 - シミュレーションを用いた制御パラメータの掘削性能への影響評価
吉田 達哉; 辻内 伸好; 伊藤 彰人; 鞍谷 文保; 平野 貴司; 安藤 博昭
設計工学, 公益社団法人 日本設計工学会, 51(11) 821 - 836, 2016年 - The Influence of a Golf Club's Inertia on Shaft Movement During the Golfer's Swing
Kenta Matsumoto; Nobutaka Tsujiuchi; Takayuki Koizumi; Akihito Ito; Masahiko Ueda; Kosuke Okazaki
ENGINEERING OF SPORT 11, 147 360 - 365, 2016年, 研究論文(国際会議プロシーディングス) - 逆音響解析を用いた音源モデルの構築と騒音伝達経路解析
明井政博; ヤンマー; 辻内伸好; 伊藤彰人; 山内貴之
農業食料工学会誌, 77(3) 186 - 196, 2015年05月 - Multipurpose Optimization of Camera Placement and Application to Random Bin-Picking
Akihito Ito; Nobutaka Tsujiuchi; Yusuke Okada
IECON 2015 - 41ST ANNUAL CONFERENCE OF THE IEEE INDUSTRIAL ELECTRONICS SOCIETY, 528 - 533, 2015年, 研究論文(国際会議プロシーディングス) - Real-time Motion Discrimination Considering Variation of EMG Signals Associated with Lapse of Time
Masashi Shiraki; Nobutaka Tsujiuchi; Ito Akihito; Tetsushi Yamamoto
2015 37TH ANNUAL INTERNATIONAL CONFERENCE OF THE IEEE ENGINEERING IN MEDICINE AND BIOLOGY SOCIETY (EMBC), 490 - 493, 2015年, 研究論文(国際会議プロシーディングス) - Analysis of Shaft Movement Using FEM Model Considering Inertia Effect of Club Head
Kenta Matsumoto; Nobutaka Tsujiuchi; Takayuki Koizumi; Akihito Ito; Masahiko Ueda; Kosuke Okazaki
IMPACT OF TECHNOLOGY ON SPORT VI' 7TH ASIA-PACIFIC CONGRESS ON SPORTS TECHNOLOGY, APCST2015, 112 10 - 15, 2015年, 研究論文(国際会議プロシーディングス) - Dynamic Analysis for Golf Swing Using of Mode Synthetics Method for Suggesting an Optimal Club
松本 賢太; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 植田 勝彦; 岡崎 弘祐
2014 SCITEPRESS SCIENCE AND TECHNOLOGY, 27 - 33, 2014年10月 - 総説・特集③:人間工学のための計測手法 第1部:動作計測(3)-力覚センサによる動作計測-
辻内伸好; 伊藤彰人
人間工学, 50(5) 125 - 137, 2014年10月 - ツインサーボモータの協調制御による精密位置決め法(遊星歯車を増設した直動機構の特性評価)
内田 豊一; 伊藤 彰人; 北村 敏也; 古屋 信幸
日本機械学会論文集, The Japan Society of Mechanical Engineers, 80(814) DR0162 - DR0162, 2014年 - Motion Discrimination Technique by EMG Signals Using Hyper-Sphere Model
Tetsushi Yamamoto; Nobutaka Tsujiuchi; Akihito Ito; Takayuki Koizumi
2014 36TH ANNUAL INTERNATIONAL CONFERENCE OF THE IEEE ENGINEERING IN MEDICINE AND BIOLOGY SOCIETY (EMBC), 5 - 8, 2014年, 研究論文(国際会議プロシーディングス) - Vibration behavior analysis of tire in operational condition by receptance method
M. Matsubara; N. Tsujiuchi; T. Koizumi; A. Ito; Y. Hirano; S. Kawamura
PROCEEDINGS OF INTERNATIONAL CONFERENCE ON NOISE AND VIBRATION ENGINEERING (ISMA2014) AND INTERNATIONAL CONFERENCE ON UNCERTAINTY IN STRUCTURAL DYNAMICS (USD2014), 1755 - 1768, 2014年, 研究論文(国際会議プロシーディングス) - Measurement of Rehabilitation in Thumb MP Joint Subluxation due to Rheumatoid Arthritis
Keisuke Kitano; Nobutaka Tsujiuchi; Akihito Ito; Daisaku Tokunaga; Toshikazu Kubo; Satoru Nakamura
2014 36TH ANNUAL INTERNATIONAL CONFERENCE OF THE IEEE ENGINEERING IN MEDICINE AND BIOLOGY SOCIETY (EMBC), 5308 - 5311, 2014年, 研究論文(国際会議プロシーディングス) - Quantitative Evaluation of Unrestrained Human Gait on Change in Walking Velocity
Nobutaka Tsujiuchi; Akihito Ito; Takayuki Koizumi; Shota Nakamura; Yasushi Matsuda; Youtaro Tsuchiya; Yuichiro Hayashi
2014 36TH ANNUAL INTERNATIONAL CONFERENCE OF THE IEEE ENGINEERING IN MEDICINE AND BIOLOGY SOCIETY (EMBC), 2521 - 2524, 2014年, 研究論文(国際会議プロシーディングス) - ステレオカメラの幾何学的不変量による三次元画像計測:—複比と測定基準スケールによる三次元座標算出法—
古屋 信幸; 清水 毅; 伊藤 彰人; 伊東 勝
精密工学会誌, 公益社団法人 精密工学会, 78(10) 875 - 879, 2012年 - 複数サーボモータの協調制御による精密位置決め法
内田 豊一; 伊藤 彰人; 大島 達也; 古屋 信幸
日本機械学会論文集 C編, The Japan Society of Mechanical Engineers, 77(778) 2280 - 2289, 2011年 - Proposal of Structural Optimization Method for a Six-Axis Force/Moment Sensor Attached to a Prosthetic Limb
HAYASHI Yuichiro; TSUJIUCHI Nobutaka; KOIZUMI Takayuki; OSHIMA Hiroko; ITO Akihito; TSUCHIYA Youtaro
Journal of System Design and Dynamics, The Japan Society of Mechanical Engineers, 5(5) 1030 - 1044, 2011年 - Structural optimization of the thin-type four-axis force/moment sensor for a robot finger
Yuichiro Hayashi; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Akihito Ito; Youtaro Tsuchiya
Nihon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Japan Society of Mechanical Engineers, Part C, 76(772) 3309 - 3315, 2010年, 研究論文(国際会議プロシーディングス) - Structural Optimization of the Thin-Type Four-Axis Force/Moment Sensor for a Robot Finger Using Response Surface Methodology and Desirability Function
Yuichiro Hayashi; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Tohru Hiroshima; Akihito Ito; Youtaro Tsuchiya
2009 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS (ROBIO 2009), VOLS 1-4, 1750 - +, 2009年, 研究論文(国際会議プロシーディングス) - Optimized Design Method of Three-Axis Force Sensor for Robot Fingers
Hiroko Oshima; Nobutaka Tsujiuchi; Takayuki Koizumi; Yuichiro Hayashi; Akihito Ito; Youtaro Tsuchiya
2009 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS (ROBIO 2009), VOLS 1-4, 700 - +, 2009年, 研究論文(国際会議プロシーディングス) - 実験計画法を用いた三軸触覚センサの最適設計
大島裕子; 小泉孝之; 辻内伸好; 土屋陽太郎; 伊藤彰人
設計工学, 44(10) 559 - 566, 2009年 - Slip detection and error analysis of tactile sensor
H. Oshima; N. Tsujiuchi; T. Kiozumi; A. Ito; Y. Nojiri; Y. Tsuchiya; S. Kurogi; N. Hirama
COMPUTATIONAL METHODS, PTS 1 AND 2, 761 - +, 2006年, 研究論文(国際会議プロシーディングス) - ロボット指のための小型触覚センサの開発
伊藤彰人; 辻内伸好; 小泉孝之; 大島裕子
日本機械学会論文集 C編, 一般社団法人日本機械学会, 72(721) 2721 - 2726, 2006年 - 分布型センサのスポーツ工学分野への適用(釣り,スポーツ全般)
伊藤 彰人; 辻内 伸好; 小泉 孝之; 大島 裕子; 野尻 芳郎; 土屋 陽太郎; 平間 直道; 黒木 史郎
ジョイント・シンポジウム講演論文集:スポーツ工学シンポジウム:シンポジウム:ヒューマン・ダイナミックス, 一般社団法人日本機械学会, 2004 253 - 256, 2004年
MISC
- 連続的なその場ジャンプの神経・力学モデルの構築
新開匠; 江上静子; 大島裕子; 辻内伸好; 伊藤彰人; 青井伸也; 土屋和雄
システム制御情報学会研究発表講演会講演論文集(CD-ROM), 68th, 2024年 - 足踏み運動の神経・力学モデルの構築
江上静子; 新開匠; 辻内伸好; 伊藤彰人; 大島裕子; 青井伸也; 土屋和雄
自律分散システム・シンポジウム(CD-ROM), 36th, 2024年 - スイング圧縮機メカ部挙動解明のための機構解析モデル構築
平田理麻; 辻内伸好; 伊藤彰人; 伊勢谷春野; 川畑真一; 出口良平; 西村公佑
日本冷凍空調学会年次大会講演論文集(CD-ROM), 2024, 2024年 - 油圧ショベル模型によるスミス補償器を活用した水平均し作業の実現
川村和輝; 伊藤彰人; 生辻内伸好; 川村岳
日本機械学会ロボティクス・メカトロニクス講演会講演論文集(CD-ROM), 2023, 2023年 - モータを備えた可変剛性鉛直免震装置の性能評価
石飛佑大; 辻内伸好; 伊藤彰人; 小森幹斗; 安田正志
Dynamics & Design Conference (CD-ROM), 2023, 2023年 - トラクター構造が乗降動作時の身体負担におよぼす影響
森井紫音; 辻内伸好; 伊藤彰人
日本機械学会年次大会講演論文集(CD-ROM), 2023, 2023年 - 負荷制御型トレッドミル上歩行における歩行者に生じる相互作用力を用いた速度制御
中田瑛己; 伊藤彰人; 辻内伸好; 和木田茂
日本機械学会年次大会講演論文集(CD-ROM), 2023, 2023年 - シャフトの変形挙動の違いを与えるゴルフスイング動作の抽出
岡崎弘祐; 辻内伸好; 伊藤彰人; 石川周; 植田勝彦; 中村佑斗
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2023, 2023年 - 主成分分析によるシャフト質量変化時のゴルフスイングの特徴分析
石川周; 岡崎弘祐; 中村佑斗; 辻内伸好; 伊藤彰人; 大島裕子; 植田勝彦
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2023, 2023年 - 慣性センサを用いた人の運動計測
伊藤彰人; 北野敬祐; 辻内伸好
バイオメカニズム学会誌, 47(2), 2023年 - ゴルフスイングに関連する基本動作の改善がスイング動作に与える影響の調査
岡崎弘祐; 辻内伸好; 伊藤彰人; 伊藤康介; 小林宏; 松本賢太; 三野博孝; 植田勝彦
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2022, 2022, 2022年11月 - 特異値分解を用いたゴルフスイングの特徴分析
松本賢太; 辻内伸好; 伊藤彰人; 小林宏; 植田勝彦; 岡崎弘祐
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2022, 2022, 2022年11月 - 統計的手法を用いたクラブ特性がスイング挙動に与える影響の評価
伊藤康介; 岡崎弘祐; 辻内伸好; 伊藤彰人; 大島裕子; 植田勝彦
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2022, 2022年11月 - シャフトの変形挙動に変化を与えるスイング中の動作の抽出に向けた取り組み
岡崎弘祐; 辻内伸好; 伊藤彰人; 伊藤康介; 植田勝彦
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2022, 2022, 2022年11月 - 負剛性機構を用いた鉛直免震装置の性能評価
石飛佑大; 辻内伸好; 伊藤彰人; 前井雄太; 安田正志
日本機械学会Dynamics and Design Conference 2022, 2022, 2022年09月 - 低重力環境模擬のための吊り上げ式免荷重装置の制御系設計
髙見亮太; 辻内伸好; 伊藤彰人; 田中克典; 平野貴司
日本機械学会2022年度年次大会, 2022年09月 - 慣性センサを用いたピアノ演奏時の動作解析
竹原優作; 北野敬祐; 伊藤彰人; 辻内伸好
日本機械学会2022年度年次大会, 2022, 2022年09月 - 紐状柔軟物体のモデル構築とロボットアームを用いたモデルの精度評価
岡田開登; 伊藤彰人; 辻内伸好; 平山泰寛
日本機械学会2022年度年次大会, 2022, 2022年09月 - パーデューペグボード巧緻性テストにおける慣性センサを用いた手指運動解析
北野敬祐; 北野敬祐; 伊藤彰人; 辻内伸好
LIFE講演概要集(CD-ROM), 2022, 2022年09月 - 冗長マニピュレータを用いた障害物回避軌道の自動生成
田中和樹; 伊藤彰人; 辻内伸好; 今井隆博
日本機械学会ロボティクス・メカトロニクス講演会2022, 2022, 2022年06月 - 一定の大きさの負荷を与えたときの負荷制御型トレッドミルにおける歩行分析―下肢筋活動度に関する考察―
友國佑哉; 辻内伸好; 伊藤彰人
日本機械学会第34回バイオエンジニアリング講演会, 2022年06月 - 足踏み動作の力学解析-垂直床反力パターンの解析-
江上静子; 寺川翔; 大島裕子; 伊藤彰人; 辻内伸好; 青井伸也; 土屋和雄
計測自動制御学会関西支部・システム制御情報学会シンポジウム(CD-ROM), 2021, 2022年 - リターンマップを用いた車両駆動系の非線形振動解析
山梶喜弘; 辻内伸好; 伊藤彰人
自動車技術会大会学術講演会講演予稿集(Web), 2022, 2022年 - 足踏み動作の運動解析-垂直床反力パターンの脚伸縮周波数依存性-
江上静子; 寺川翔; 大島裕子; 辻内伸好; 伊藤彰人; 青井伸也; 土屋和雄
システム制御情報学会研究発表講演会講演論文集(CD-ROM), 66th, 2022年 - タイヤゴムブロックと路面との間における局所的なStick-slip現象の解明とその物理モデルの構築
橋本拓也; 辻内伸好; 伊藤彰人; 宮本学; 手崎燎
日本機械学会関西支部第97期定時総会講演会, 2022年 - ゴルフクラブ特性がスイング中の発揮トルクのスペクトル変動に与える影響について
岡崎弘祐; 岡崎弘祐; 辻内伸好; 伊藤彰人; 伊藤康介; 植田勝彦; 中村佑斗
Dynamics & Design Conference (CD-ROM), 2021, 2021年 - 慣性センサによる手首推定位置に基づいたロボット遠隔教示システムの構築
松岡大成; 辻内伸好; 伊藤彰人; 安田和磨; POMARES David
Dynamics & Design Conference (CD-ROM), 2021, 2021年 - 負荷制御型トレッドミルの負荷パターンが下肢へ与える影響評価
友國佑哉; 辻内伸好; 伊藤彰人; 大内陽; 廣瀬圭
日本機械学会年次大会講演論文集(CD-ROM), 2021, 2021年 - キックポイントが異なるシャフトのスイング中における変形挙動の差の抽出
岡崎弘祐; 岡崎弘祐; 辻内伸好; 伊藤彰人; 伊藤康介; 植田勝彦
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2021, 2021年 - 慣性センサによるヒトの関節位置を考慮した上体運動計測モデルの構築
三間郭凱; 伊藤彰人; 辻内伸好; 北野敬祐; 植田慎也
日本機械学会運動と振動の制御シンポジウム論文集(CD-ROM), 17th, 2021年 - 慣性センサによる手指動作計測結果に対する特異値分解と階層型クラスタリングを用いた手指巧緻性の解析
北野敬祐; 伊藤彰人; 辻内伸好
LIFE講演概要集(CD-ROM), 2020/2021, 2021年 - その場歩行とその場走行の遷移現象の解析
寺川翔; 辻内伸好; 伊藤彰人; 大島裕子; 青井伸也; 土屋和雄
システム制御情報学会研究発表講演会講演論文集(CD-ROM), 65th, 2021年 - 股関節角度に基づくワイヤ型アシストスーツのアシストタイミング決定手法の提案
ZHANGAI Junyuan; 村井大海; 辻内伸好; 伊藤彰人; 井上剛; 小澤順; 村上健太; 半沢文也; 岸本一昭
Dynamics & Design Conference (CD-ROM), 2020, 2020年 - 安定指標を用いた2指マニピュレータによる物体把持シミュレーション
古川翔梧; 伊藤彰人; 辻内伸好; MA Yudong
日本機械学会ロボティクス・メカトロニクス講演会講演論文集(CD-ROM), 2020, 2020年 - 障害物回避を考慮した冗長マニピュレータのダイレクトティーチング
伊藤彰人; 辻内伸好; 今井隆博; 浦公平
日本機械学会ロボティクス・メカトロニクス講演会講演論文集(CD-ROM), 2020, 2020年 - 固有振動数が調節可能な鉛直免震装置の開発とその性能評価
宇高希; 辻内伸好; 伊藤彰人; 前井雄太; 安田正志
日本機械学会関西支部定時総会講演会講演論文集(CD-ROM), 95th, 2020年 - リニアロボット垂直アームの振動抑制制御
矢ヶ部奎志; 辻内伸好; 伊藤彰人; 吉田隼人
日本機械学会関西支部定時総会講演会講演論文集(CD-ROM), 95th, 2020年 - 伝達経路解析と相互平均コンプライアンスの併用による振動伝達部位の特定
新原拓; 辻内伸好; 伊藤彰人; 森辰宗
日本機械学会関西支部定時総会講演会講演論文集(CD-ROM), 95th, 2020年 - 熟練度の異なるゴルファーの協調動作の分析
松本賢太; 辻内伸好; 伊藤彰人; 小林宏; 植田勝彦; 岡崎弘祐
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2020, 2020年 - スイングによる調子が異なるシャフトでの変形挙動の差の分類
岡崎弘祐; 岡崎弘祐; 辻内伸好; 伊藤彰人; 杉本翔; 植田勝彦; 中村佑斗
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2020, 2020年 - 帯状慣性センサを用いたカーブ時の座面形状推定
吉見恭平; 廣瀬圭; 廣瀬圭; 辻内伸好; 伊藤彰人; 仲道泰洋
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス講演論文集(CD-ROM), 2020, 2020年 - 負荷制御型トレッドミルによる歩行解析
伊藤 彰人; 辻内 伸好; 大内 陽; 廣瀬 圭
宇宙航空環境医学, 日本宇宙航空環境医学会, 56(1-4) 87 - 87, 2019年12月 - 筋骨格モデルによるイチゴ収穫作業での身体的負担の評価
山内 貴之; 辻内 伸好; 伊藤 彰人; 迫田 空
生活生命支援医療福祉工学系学会連合大会講演要旨集, (一社)ライフサポート学会, 2019 51 - 51, 2019年09月 - 妊娠体験ジャケット着用者の歩行動作分析
松原真己; 益戸直也; 河村庄造; 中垣明美; 伊藤彰人; 辻内伸好
Dynamics and Design Conference 2019講演論文集, 2019年08月 - Hand Motion Measurement using Inertial Sensor System and Accurate Improvement by Extended Kalman Filter.
Keisuke Kitano; Akihito Ito; Nobutaka Tsujiuchi
Conference proceedings : ... Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society. Annual Conference, 2019 6405 - 6408, 2019年07月 - その場歩行とその場走行の歩容遷移に関する実験的考察
八切宗矩; 松本賢太; 於本裕之介; 青井伸也; 大島裕子; 辻内伸好; 伊藤彰人; 土屋和雄
システム制御情報学会研究発表講演会講演論文集(CD-ROM), システム制御情報学会, 63rd ROMBUNNO.TS08‐1‐3 - 285, 2019年05月15日 - トレッドミル上歩行中のワイヤ型歩行アシストスーツの股関節屈曲支援効果
村井大海; 辻内伸好; 伊藤彰人; 鈴木良; 西片雄斗; 村上健太; 井上剛; 小澤順
Dynamics & Design Conference (CD-ROM), 2019, 2019年 - 下肢筋活動に基づくワイヤ型歩行アシストスーツの制御方法
張浚源; 村井大海; 井上剛; 小澤順; 村上健太; 半沢文也; 岸本一昭; 伊藤彰人; 辻内伸好
計測自動制御学会システム・情報部門学術講演会講演論文集(CD-ROM), 2019, 2019年 - 反重力トレッドミルを用いた荷重免荷による歩行運動の変化
荒木啓輔; 辻内伸好; 伊藤彰人; 大平充宣; 上林清孝; 吉見恭平
日本機械学会年次大会講演論文集(CD-ROM), 2019, 2019年 - テラメカニクス理論に基づく履帯車両の登坂走行モデルの開発とモデルベースの登坂走行制御設計
小原大和; 辻内伸好; 伊藤彰人; 安藤博昭
日本機械学会運動と振動の制御シンポジウム論文集(CD-ROM), 16th, 2019年 - 慣性センサシステムを用いた並進加速度を伴う立位バランス評価における姿勢推定に関する研究
仲道 泰洋; 辻内 伸好; 伊藤 彰人; 廣瀬 圭; 園部 元康
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2019(0) A - 7, 2019年 - シングルベルト・スプリットベルトの負荷制御型トレッドミルを用いた歩行への影響評価
大内 陽; 辻内 伸好; 伊藤 彰人; 廣瀬 圭
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2019(0) A - 17, 2019年 - ウェアラブルセンサシステムを用いた関節トルク推定における誤差解析に関する研究
廣瀬 圭; 近藤 亜希子; 仲道 泰洋; 伊藤 彰人; 辻内 伸好
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2019(0) 459 - 459, 2019年 - 慣性センサを用いた上体運動計測モデルの構築
植田慎也; 伊藤彰人; 辻内伸好; 北野敬祐
日本機械学会運動と振動の制御シンポジウム論文集(CD-ROM), 16th, 2019年 - 慣性センサによる手指モデルの構築
長田伊織; 北野敬祐; 伊藤彰人; 辻内伸好
日本機械学会運動と振動の制御シンポジウム論文集(CD-ROM), 16th, 2019年 - 重心フィードバック搭載型重心動揺計における動作計測・評価に関する研究
仲道泰洋; 伊藤彰人; 辻内伸好; 廣瀬圭; 園部元康
LIFE講演概要集(CD-ROM), 2018 (Web) ROMBUNNO.2‐4‐3‐6 (WEB ONLY) , 2018年09月06日 - 走行路面に目標負荷を掛けた負荷制御型トレッドミルを用いた歩容解析
山本文弥; 辻内伸好; 伊藤彰人; 北野敬祐; 廣瀬圭
LIFE講演概要集(CD-ROM), 2018 (Web) ROMBUNNO.1‐1‐2‐7 (WEB ONLY) , 2018年09月06日 - ウェアラブルセンサシステムを用いた歩行速度・位置推定に関する研究
廣瀬圭; 廣瀬圭; 近藤亜希子; 仲道泰洋; 伊藤彰人; 辻内伸好
LIFE講演概要集(CD-ROM), 一般社団法人 日本機械学会, 2018 (Web)(0) ROMBUNNO.1‐1‐1‐5 (WEB ONLY) - 27, 2018年09月06日 - 慣性センサを用いた前腕および手指リンクのモデル化及び補正法の提案
北野敬祐; 伊藤彰人; 辻内伸好
LIFE講演概要集(CD-ROM), 2018 (Web) ROMBUNNO.2‐4‐4‐4 (WEB ONLY) , 2018年09月06日 - 帯状慣性センサシステムを用いた座面形状の推定に関する研究
藤原 慎吾; 廣瀬 圭; 近藤 亜希子; 仲道 泰洋; 伊藤 彰人; 辻内 伸好
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2018(0) B - 27, 2018年 - 重心フィードバック搭載型重心動揺計の力学解析に関する研究
仲道 泰洋; 伊藤 彰人; 辻内 伸好; 廣瀬 圭; 園部 元康
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2018(0) A - 21, 2018年 - ウェアラブルセンサシステムを用いた関節トルク推定の歩行解析への適用に関する研究
笹川 壮太; 廣瀬 圭; 近藤 亜希子; 仲道 泰洋; 伊藤 彰人; 辻内 伸好
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2018(0) A - 16, 2018年 - Contribution evaluation to the vibration of the structure having the multiple paths based on transfer path analysis
Yoshimune Mori; Koichi Honke; Atsushi Fujimoto; Nobutaka Tsujiuchi; Akihito Ito
25th International Congress on Sound and Vibration 2018, ICSV 2018: Hiroshima Calling, 5 2947 - 2954, 2018年01月01日 - Developing evaluation model of tire pattern impact noise
Wataru Takahashi; Nobutaka Tsujiuchi; Akihito Ito; Hamiyu Seki; Kazumasa Hosomi
INTER-NOISE 2018 - 47th International Congress and Exposition on Noise Control Engineering: Impact of Noise Control Engineering, 2018年01月01日 - 慣性センサを用いた手指運動計測システムの開発
北野 敬祐; 伊藤 彰人; 辻内 伸好; 和木田 茂; 天川 良太
バイオエンジニアリング講演会講演論文集, 一般社団法人 日本機械学会, 2018(0) 2D08 , 2018年 - ワイヤ型アシストスーツのトレッドミル歩行における力学的影響評価
村井 大海; 小澤 順; 辻内 伸好; 伊藤 彰人; 北野 敬祐; 村上 健太; 岡田 征剛; 井上 剛; 遠藤 維; 今村 由芽子
人工知能学会全国大会論文集, 一般社団法人 人工知能学会, 2018(0) 1G301 - 1G301, 2018年 - リニアロボット垂直アームの動特性評価によるモデル化
蓬田 克; 辻内 伸好; 伊藤 彰人; 矢ヶ部 奎志
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - 多岐伝達経路を有する機械構造物の振動伝達抑制に関する研究
藤本 淳志; 森 辰宗; 辻内 伸好; 伊藤 彰人; 本家 浩一; 新原 拓
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - 装着型計測装置を用いた免荷歩行の特性解析と評価
西山 智士; 辻内 伸好; 伊藤 彰人; 大平 充宣; 上林 清孝; 荒木 啓輔
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - 可変剛性を有する鉛直免震装置の特性解析と性能評価
関谷 嘉文; 辻内 伸好; 伊藤 彰人; 安田 正志; 宇高 希
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - ななめ型全自動洗濯機における流体バランサのモデル化
山本 翔也; 辻内 伸好; 伊藤 彰人; 桑原 亮太; 佐藤 弘樹
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - 履帯車両の登坂モデルの開発と制御法の提案
近久 宏平; 辻内 伸好; 伊藤 彰人; 小原 大和; 安藤 博昭
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2018(0), 2018年 - 油圧ショベルの自動掘削における土壌パラメータに対する制御パラメータの検討
平野 貴司; 吉田 達哉; 辻内 伸好; 伊藤 彰人; 鞍谷 文保; 立石 匡; 渥美 航; 安藤 博昭
自動制御連合講演会講演論文集, 自動制御連合講演会, 61(0) 1263 - 1270, 2018年 - 腱駆動技巧ロボットハンドを用いた物体把持制御システムの構築
伊藤 彰人; 辻内 伸好; 志野 安樹; 於本 裕之介
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2018(0) 1P1 - H17, 2018年 - 慣性センサを用いたリアルタイム運動計測システムの構築とロボット教示システムへの適用
伊藤 彰人; 辻内 伸好; 堀尾 健児; 北野 敬祐
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2018(0) 1P2 - D14, 2018年 - スコットラッセル型5軸ロボットアームの手先外力推定法
伊藤 彰人; 辻内 伸好; 浦 公平; 菊池 駿介
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2018(0) 2A1 - H13, 2018年 - ポテンシャル法とRRTを用いたマニピュレータの障害物回避経路計画手法
伊藤 彰人; 辻内 伸好; 佐藤 健人
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2018(0) 2A2 - D17, 2018年 - 主成分分析を用いた筋電義手の指動作識別に対する特徴量の最適化
辻内 伸好; 伊藤 彰人; 久本 佳樹
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2018(0) 2P1 - D03, 2018年 - 反重力トレッドミルを用いた微小重力環境下の歩行特性解析
荒木 啓輔; 辻内 伸好; 伊藤 彰人; 大平 充宣; 上林 清孝
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2018(0), 2018年 - 内燃機関の音源モデルを用いたキャビンレストラクタの低騒音化検討
長村 弘一; 辻内 伸好; 伊藤 彰人; 山内 貴之
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2018(0), 2018年 - ワイヤ型歩行アシストスーツが下肢関節トルクと歩容に与える影響
村井 大海; 小澤 順; 辻内 伸好; 伊藤 彰人; 北野 敬祐; 村上 健太; 岡田 征剛; 井上 剛; 遠藤 維; 今村 由芽子
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2018(0) 521 - 521, 2018年 - 微粒子配合ゴムにおける界面すべりの直接観察
松原 真己; 寺本 真ノ将; 長谷 朝博; 伊勢 智彦; 河村 庄造; 辻内 伸好; 伊藤 彰人
年次大会, 一般社団法人 日本機械学会, 2018(0) G1000704 , 2018年 - 避難シミュレーションにおける歩行者モデルへの移動速度に応じた回避行動の導入
笠原 佑亮; 伊藤 彰人; 辻内 伸好; 福田 貴大; 堀井 宏祐
年次大会, 一般社団法人 日本機械学会, 2018(0), 2018年 - 脱水時における流体バランサつきななめ型全自動洗濯機のモデル化
桑原 亮太; 辻内 伸好; 伊藤 彰人; 佐藤 弘樹
年次大会, 一般社団法人 日本機械学会, 2018(0), 2018年 - 歩行アシストスーツが下肢関節に与える影響の評価
山本 文弥; 辻内 伸好; 伊藤 彰人; 北野 敬祐; 村上 健太; ジョン・ステファン
生活生命支援医療福祉工学系学会連合大会講演要旨集, (一社)ライフサポート学会, 2017 255 - 258, 2017年09月 - 慣性センサを用いた手先位置姿勢推定とロボット教示システムへの適用
伊藤 彰人; 辻内 伸好; 堀尾 健児; 宮川 裕基; 北野 敬祐
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2017(0) 1P1 - L09, 2017年 - 筋電義手における指動作識別手法の作成
辻内 伸好; 伊藤 彰人; 久本 佳樹
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2017(0) 2A2 - G04, 2017年 - 空気圧人工筋駆動マニピュレータのモデル化と物体把持制御
伊藤 彰人; 辻内 伸好; 於本 裕之介
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2017(0) 2P1 - C07, 2017年 - 筋電信号解析のための非負値行列因子分解
大島 裕子; 辻内 伸好; 伊藤 彰人; 中陦 克己; 日暮 泰男; 青井 伸也; 舩戸 徹郎; 土屋 和雄
年次大会, 一般社団法人 日本機械学会, 2017(0), 2017年 - 微粒子複合化天然ゴムを用いた制振材料の動的粘弾性評価
松原 真己; 長谷 朝博; 山田 莉香子; 浜口 和也; 伊勢 智彦; 河村 庄造; 辻内 伸好; 伊藤 彰人
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2017(0) 246 - 246, 2017年 - 逆音響解析における最適な観測点選定方法を用いたディーゼルエンジンの音源モデル構築への適用
辻内 伸好; 明井 政博; 伊藤 彰人; 長村 弘一; 久保田 大介
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2017(0), 2017年 - 装着型計測装置を用いた片麻痺歩行特性の定量評価
西山 智士; 辻内 伸好; 伊藤 彰人; 足立 渡; 纐纈 俊昭; 禰占 哲郎
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2017(0), 2017年 - グリップ並進加速度により生じるヘッド重心の運動を考慮したヘッドの姿勢推定
古川 和樹; 辻内 伸好; 伊藤 彰人; 松本 賢太; 植田 勝彦; 岡崎 弘祐
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2017(0) B - 32, 2017年 - 落下時における幼児頭部の動的応答と損傷評価
川村 龍亮; 辻内 伸好; 伊藤 彰人; 水冨 貴俊
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2017(0), 2017年 - モーションセンサを用いた産業用ロボット教示システムのための位置・姿勢推定
宮川 裕基; 伊藤 彰人; 辻内 伸好; 堀尾 健児
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2017(0), 2017年 - 多岐伝達経路を有する機械構造物への伝達経路解析手法の適用
森 辰宗; 吉村 旭史; 辻内 伸好; 伊藤 彰人; 藤本 淳志; 山口 善三; 本家 浩一
Dynamics & Design Conference, 一般社団法人 日本機械学会, 2016-(October), 2016年09月27日 - 指動作計測システムを用いた関節に関する幾何学的情報の推定
北野 敬祐; 伊藤 彰人; 辻内 伸好; 和木田 茂
生活生命支援医療福祉工学系学会連合大会講演要旨集, (一社)ライフサポート学会, 2016 507 - 510, 2016年09月 - Proposal of the evaluation function for selection of optimal measurement location in inverse-numerical acoustic analysis
Masahiro Akei; Nobutaka Tsujiuchi; Daisuke Kubota; Akihito Ito; Takayuki Yamauchi
Proceedings of the INTER-NOISE 2016 - 45th International Congress and Exposition on Noise Control Engineering: Towards a Quieter Future, 6554 - 6564, 2016年08月21日 - Optimization of Flywheel Damper for Passenger Car to Reduce Acceleration/Deceleration Shock
Y. Shimizu; N. Tsujiuchi; A. Ito; S. Yamamoto
PROCEEDINGS OF ISMA2016 INTERNATIONAL CONFERENCE ON NOISE AND VIBRATION ENGINEERING AND USD2016 INTERNATIONAL CONFERENCE ON UNCERTAINTY IN STRUCTURAL DYNAMICS, 3873 - 3882, 2016年 - 608 リンクとクランク機構を用いた低床低固有値鉛直免震装置の開発(GS10,12 免震・制振,研究討論セッション)
辻内 伸好; 安田 正志; 南 燐峰; 伊藤 彰人; 関谷 嘉文
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2016(0) 185 - 188, 2016年 - M723 固液分離機の高効率化に関する研究(GS10,12 製造・エネルギー供給の最適化,修士研究発表セッション)
辻内 伸好; 伊藤 彰人; 阿部 昌明; 梅本 博一; 田辺 裕基; 大久保 敦史
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2016(0) 331 - 331, 2016年 - 3次元FEMモデルによるゴルフスイング時のクラブヘッドの姿勢推定
松本 賢太; 辻内 伸好; 伊藤 彰人; 清田 大貴; 植田 勝彦; 岡崎 弘祐
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2016(0) A - 11, 2016年 - 五軸ロボットアームを用いた任意平面に運動を拘束するダイレクトティーチング法
伊藤 彰人; 辻内 伸好; 菊池 駿介; 中家 祐二; 中村 陽一郎
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2016(0) 2P2 - 04a5, 2016年 - 産業用ロボットの3次元把持姿勢導出のための人工ポテンシャル法
伊藤 彰人; 辻内 伸好; 薩摩 啓太
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2016(0) 2A2 - 03b7, 2016年 - 空気圧人工筋駆動ロボットハンドによる把持物体の位置・姿勢制御:―オブジェクトレベル制御を用いての空気圧ロボットハンドの物体把持・操りシステムの提案―
伊藤 彰人; 辻内 伸好; 菅森 義人
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2016(0) 2A2 - 04a4, 2016年 - Placement Technique of Measurement Points for Inverse Acoustic Analysis
Hiroko Oshima; Hilmi Bin; Hela Ladin; Akihito Ito; Nobutaka Tsujiuchi; Takayuki Koizumi
SAE Technical Papers, 2015-November, 2015年11月17日 - Comparison Method of Input Powers and Contribution Rates between Statistical Energy Analysis and Transfer Path Analysis for Small Power Generator's Enclosure
Hilmi Bin; Hela Ladin; Nobutaka Tsujiuchi; Katsuhiko Kuroda; Akihito Ito
SAE Technical Papers, 2015-November, 2015年11月17日 - 関節リウマチのリハビリ動作計測と慣性を考慮したMP関節のバネ要素によるモデル化
北野 敬祐; 辻内 伸好; 伊藤 彰人
生活生命支援医療福祉工学系学会連合大会講演要旨集, (一社)ライフサポート学会, 2015 61 - 61, 2015年09月 - 401 ゴルファーの運動特性を考慮したゴルフクラブの力学解析
松本 賢太; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 植田 勝彦; 岡崎 弘祐
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2015 "401 - 1"-"401-12", 2015年08月25日 - 507 伝達経路解析を用いた車体骨格の振動伝達特性の解析
辻内 伸好; 伊藤 彰人; 森 辰宗; 吉村 旭史
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2015 "507 - 1"-"507-12", 2015年08月25日 - Natural frequency analysis of tire vibration using a thin cylindrical shell model
Masami Matsubara; Nobutaka Tsujiuchi; Takayuki Koizumi; Akihito Ito; Kensuke Bito
SAE Technical Papers, 2015-June, 2015年06月15日 - 176 セルロース複合ゴムを用いた制振鋼板の制振性評価
松原 真己; 河村 庄造; 長谷 朝博; 辻内 伸好; 伊藤 彰人
東海支部総会講演会講演論文集, 一般社団法人 日本機械学会, 2015(0) _176 - 1_-_176-2_, 2015年 - 113 逆音響解析によるエンジン音源モデルの構築と防音構造への適用(OS4 機械の振動・騒音および制御に関する新技術(2),研究討論セッション)
辻内 伸好; 明井 政博; 伊藤 彰人; 山内 貴之
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2015(0) 38 - 41, 2015年 - M108 トレッドミルによる運動訓練システムを用いた歩行・走行時の動力学特性解析(GS10 機械力学・計測制御(2),修士研究発表セッション)
浅野 真由; 辻内 伸好; 伊藤 彰人; 大木 淳嗣
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2015(0) 268 - 268, 2015年 - M110 歩行者モデルを用いた避難シミュレーションの検証(GS10 機械力学・計測制御(3),修士研究発表セッション)
角井 康司; 辻内 伸好; 伊藤 彰人; 市村 まどか; 堀井 宏祐
関西支部講演会講演論文集, 一般社団法人 日本機械学会, 2015(0) 270 - 270, 2015年 - B301 間接リウマチのリハビリ動作の計測とMP関節のバネ要素によるモデル化(OS14 制御用センサ・アクチュエータ)
辻内 伸好; 伊藤 彰人; 北野 敬祐
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人 日本機械学会, 2015(0) 465 - 469, 2015年 - B302 ウェアラブルな計測装置を用いた歩行解析および精度検証(OS14 制御用センサ・アクチュエータ)
辻内 伸好; 伊藤 彰人; 中村 匠汰; 足立 渡
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人 日本機械学会, 2015(0) 470 - 475, 2015年 - B-34 クラブヘッドの慣性がシャフト挙動に及ぼす影響(ゴルフシャフト)
松本 賢太; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 植田 勝彦; 岡崎 弘祐
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人 日本機械学会, 2015(0) _B - 34-1_-_B-34-10_, 2015年 - 1P2-K02 時間経過に伴う筋電信号の変化を考慮した動作識別手法の提案
辻内 伸好; 伊藤 彰人; 白木 雅; 山本 哲史
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2015(0) _1P2 - K02_1-_1P2-K02_4, 2015年 - 1P2-N06 ポテンシャル法による産業用ロボットの把持姿勢決定
伊藤 彰人; 辻内 伸好; 薩摩 啓太; 久世 大輔
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2015(0) _1P2 - N06_1-_1P2-N06_4, 2015年 - 2A1-T01 ロボット視用カメラ配置の多目的最適化とばら積みピッキングへの適用
辻内 伸好; 伊藤 彰人; 岡田 悠佑
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人 日本機械学会, 2015(0) _2A1 - T01_1-_2A1-T01_4, 2015年 - A-15 ゴルファーの把持を考慮した有限要素モデルによるゴルフスイング挙動解析(ゴルフスイング)
松本 賢太; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 植田 勝彦; 岡崎 弘祐
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人日本機械学会, 2014 "A - 15-1"-"A-15-10", 2014年10月29日 - 128 ウェアラブルな計測装置とトレッドミルを用いた大腿義足歩行解析(領域5 ヒューマン・スポーツ・バイオ工学)
辻内 伸好; 伊藤 彰人; 中村 匠汰; 牧野 裕太; 松田 靖史; 土屋 陽太郎; 林 祐一郎
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2014 "128 - 1"-"128-12", 2014年08月25日 - 360 スコットラッセル型5軸ロボットアームの振動特性評価および振動低減(領域1 解析・設計の高度化と新展開)
辻内 伸好; 伊藤 彰人; 中家 祐二; 片山 直紀
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2014 "360 - 1"-"360-13", 2014年08月25日 - Multipurpose Optimization of Camera Position for Robot Vision by Considering Calibration Accuracy
Akihito Ito; Nobutaka Tsujiuchi; Yusuke Okada; Ryo Kojima
IECON 2014 - 40TH ANNUAL CONFERENCE OF THE IEEE INDUSTRIAL ELECTRONICS SOCIETY, 2822 - 2827, 2014年 - 227 ウェアラブルな運動計測システムを用いた歩行運動の解析(計測と分析)
足立 渡; 辻内 伸好; 小泉 孝之; 塩島 康造; 土屋 陽太郎; 井上 喜雄; 伊藤 彰人
シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集, 一般社団法人日本機械学会, 2012 315 - 319, 2012年11月14日 - 318 ヒステリシスモデルを用いた空気圧人工筋アクチュエータの制御(ロボットと制御,OS8.1 運動と振動の制御,総合テーマ:「システムを考える。境界を越えて。」)
伊藤 彰人; 鷲澤 直彦; 古屋 信幸
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2012 51 - 51, 2012年09月17日 - Development of a six-axis force/moment sensor attached to a prosthetic limb for the unrestrained gait measurement
Yuichiro Hayashi; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Akihito Ito; Youtaro Tsuchiya
Nihon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Japan Society of Mechanical Engineers, Part C, The Japan Society of Mechanical Engineers, 77(781) 3427 - 3438, 2011年12月01日 - 808 踵・足首・足趾を有する受動歩行機の安定性解析(計測・制御II)
大房 剛; 伊藤 彰人; 古屋 信幸
山梨講演会講演論文集 : Yamanashi district conference, 一般社団法人日本機械学会, 2011 236 - 237, 2011年10月22日 - 321 ヒステリシス特性を考慮した空気圧人工筋マニピュレータの制御(ロボットのダイナミクスと制御3,OS-17 ロボットのダイナミクスと制御,総合テーマ:「部門創設25周年、新たなる躍動」)
伊藤 彰人; 鷲澤 直彦; 古屋 信幸
機械力学・計測制御講演論文集, 一般社団法人日本機械学会, 2011 53 - 53, 2011年09月04日 - 302 踵・足首・足趾を有する受動歩行ロボットによる歩行の実現(歩行ロボット,OS-17 ロボットのダイナミクスと制御,総合テーマ「伝統を,未来へ!」)
花澤 雄太; 伊藤 彰人; 古屋 信幸
Dynamics & Design Conference, 一般社団法人日本機械学会, 2010 "302 - 1"-"302-6", 2010年09月14日 - 315 空気圧人工筋アクチュエータを用いたパラレルマニピュレータの運動制御(計測と制御,OS-17 ロボットのダイナミクスと制御,総合テーマ「伝統を,未来へ!」)
伊藤 彰人; 清戸 仰; 古屋 信幸
Dynamics & Design Conference, 一般社団法人日本機械学会, 2010 "315 - 1"-"315-6", 2010年09月14日 - Optimum Design of the Thin-Type Four-Axis Force/Moment Sensor for a Robot Finger
Yuichiro Hayashi; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Akihito Ito; Youtaro Tsuchiya
IECON 2010 - 36TH ANNUAL CONFERENCE ON IEEE INDUSTRIAL ELECTRONICS SOCIETY, 1287 - 1292, 2010年 - 202 蹴り出しを考慮した受動歩行シミュレーション(計測・制御I)
花澤 雄太; 伊藤 彰人; 古屋 信幸
山梨講演会講演論文集 : Yamanashi district conference, 一般社団法人日本機械学会, 2009 36 - 37, 2009年10月23日 - 201 ステレオカメラの統合的キャリブレーション法(計測・制御I)
細川 充; 古屋 信幸; 伊藤 彰人
山梨講演会講演論文集 : Yamanashi district conference, 一般社団法人日本機械学会, 2009 34 - 35, 2009年10月23日 - 621 受動歩行における踵・足首・足趾を有する足の有効性
花澤 雄太; 伊藤 彰人; 古屋 信幸
Dynamics & Design Conference, 一般社団法人日本機械学会, 2009 "621 - 1"-"621-6", 2009年08月03日 - 人工筋空気圧アクチュエータを配置した拇指対向性を実現するロボットハンドの開発
伊藤 彰人
研究助成金受給者研究報告集, 日揮・実吉奨学会, 28 120 - 125, 2009年 - 551 ロボット指用小型3軸力センサの構造最適化
辻内 伸好; 小泉 孝之; 廣島 亨; 大島 裕子; 伊藤 彰人; 土屋 陽太郎; 野尻 芳郎
Dynamics & Design Conference, 一般社団法人日本機械学会, 2008 "551 - 1"-"551-6", 2008年09月02日 - 333 ロボットハンドの指の腹に装着可能な薄型4軸力覚センサの性能評価
林 祐一郎; 辻内 伸好; 小泉 孝之; 大島 裕子; 伊藤 彰人; 土屋 陽太郎
Dynamics & Design Conference, 一般社団法人日本機械学会, 2008 "333 - 1"-"333-6", 2008年09月02日 - 1A1-H19 ロボットハンドの指先に装着可能な薄型4軸力覚センサ2倍モデルの性能評価(触覚と力覚)
林 祐一郎; 辻内 伸好; 小泉 孝之; 大島 裕子; 伊藤 彰人; 土屋 陽太郎
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2008 "1A1 - H19(1)"-"1A1-H19(4)", 2008年06月06日 - 210 ロボットハンドの指先に装着可能な薄型4軸力覚センサの開発(OS-1・S-14・15・16・19 作業ロボット)
林 祐一郎; 辻内 伸好; 小泉 孝之; 大島 裕子; 伊藤 彰人; 土屋 陽太郎
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "2 - 10", 2008年03月14日 - 1017 ロボット指用小型3軸力センサの開発(GS-10 搬送とロボット)
廣島 亨; 伊藤 彰人; 辻内 伸好; 小泉 孝之; 大島 裕子; 土屋 陽太郎
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2008(83) "10 - 17", 2008年03月14日 - Development and Characteristic Analysis for Thin-type Triaxial Force Sensor
辻内 伸好
Proceedings of the IMAC-XXV: A Conference & Exposition on Structural Dynamics(s34p06.pdf), 2007年12月01日 - 1112 ロボット指用分布型触覚センサのための小型センサ素子の開発とその特性評価(制御用センサ・アクチュエータ)
伊藤 彰人; 辻内 伸好; 小泉 孝之; 大島 裕子; 野尻 芳郎; 土屋 陽太郎; 平間 直道; 黒木 史郎
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人日本機械学会, 2007(10) 7 - 11, 2007年08月08日 - Development and structure evaluation of small sensor element for distributed-type tri-axial force sensor of robot finger
Akihito Ito; Yoshiro Nojiri; Yotaro Tsuchiya; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Naomichi Hirama; Shiro Kurogi
2007 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS, VOLS 1-5, 1309 - +, 2007年 - Development of a small tactile sensor for robot finger
Akihito Ito; Nobutaka Tsujiuchi; Takayuki Koizumi; Hiroko Oshima; Yoshiro Nojiri; Yotaro Tsuchiya; Naomichi Hirama; Shiro Kurogi
Nihon Kikai Gakkai Ronbunshu, C Hen/Transactions of the Japan Society of Mechanical Engineers, Part C, 72 2721 - 2726, 2006年09月01日 - 222 実験計画法を用いた三軸触覚センサの構造最適化
大島 裕子; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 野尻 芳郎; 土屋 陽太郎
Dynamics & Design Conference, 一般社団法人日本機械学会, 2006 "222 - 1"-"222-5", 2006年08月06日 - Verification of tactile sensor for manipulator
Hiroko Oshima; Nobutaka Tsujiuchi; Takayuki Koizumi; Akihito Ito
2006 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS, VOLS 1-3, 1083 - +, 2006年 - Contact Condition Detection by Tactile Sensor
辻内 伸好
Conference Proceedings of the Society for Experimental Mechanics Series, 2005年12月01日 - A35 3分力触覚センサを用いた並進滑り及び回転滑りの検知(OS4-1 制御用センサ・アクチュエータ)
伊藤 彰人; 西 朗見; 辻内 伸好; 小泉 孝之; 大島 裕子; 野尻 芳郎; 土屋 陽太郎; 平間 直道; 黒木 史郎
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人日本機械学会, 2005(9) 168 - 172, 2005年08月22日 - Characteristics of tactile sensor and movement detection of attached object
H Oshima; N Tsujiuchi; T Koizumi; A Ito; Y Nojiri; Y Tsuchiya; N Hirama; S Kurogi
IECON 2005: THIRTY-FIRST ANNUAL CONFERENCE OF THE IEEE INDUSTRIAL ELECTRONICS SOCIETY, VOLS 1-3, 2005 2095 - 2100, 2005年 - Relative movement evaluation between developed distributed-type tactile sensor and the contacting object
A Ito; N Tsujiuchi; T Koizumi; H Oshima; Y Nojiri; Y Tsuchiya; N Hirama; S Kurogi
2005 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-4, 1650 - 1655, 2005年 - Slip Detection with Distributed-Type Tactile Sensor
辻内 伸好
2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1 331 - 336, 2004年12月01日 - 332 マトリクス型触覚センサによる接触と滑りの検出(センサー関連技術, OS-18 計測・評価・診断)
大島 裕子; 辻内 伸好; 小泉 孝之; 伊藤 彰人; 土屋 陽太郎; 野尻 芳郎; 黒木 史郎
Dynamics & Design Conference, 一般社団法人日本機械学会, 2004 "332 - 1"-"332-6", 2004年09月27日 - 滑り検知が可能な触覚センサの開発(触覚・力覚2)
辻内 伸好; 小泉 孝之; 伊藤 彰人; 大島 裕子; 野尻 芳郎; 土屋 陽太郎; 黒木 史郎
ロボティクス・メカトロニクス講演会講演概要集, 一般社団法人日本機械学会, 2004 52 - 53, 2004年06月18日 - 1107 高分解能センサを用いた接触解析及び滑り検知(GS-10.13 運動の高精度計測)
辻内 伸好; 小泉 孝之; 高岡 正徳; 大島 裕子; 伊藤 彰人; 野尻 芳郎; 土屋 陽太郎; 黒木 史郎
関西支部講演会講演論文集, 一般社団法人日本機械学会, 2004(79) "11 - 13"-"11-14", 2004年03月17日 - 418 触覚センサの開発とその静特性
辻内 伸好; 小泉 孝之; 伊藤 彰人; 野尻 芳郎; 土屋 陽太郎; 黒木 史郎
「運動と振動の制御」シンポジウム講演論文集, 一般社団法人日本機械学会, 2003(8) 567 - 570, 2003年10月30日
講演・口頭発表等
- 熟練度の異なるゴルファーの協調動作の分析
松本賢太; 辻内伸好; 伊藤彰人; 小林宏; 植田勝彦; ゴム工; 岡崎弘祐
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2020, 2020年11月 - スイングによる調子が異なるシャフトでの変形挙動の差の分類
岡崎弘祐; 住友ゴム工業; 辻内伸好; 伊藤彰人; 杉本翔; 植田勝彦; ゴム工; 中村佑斗
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2020, 2020年11月 - ウェアラブルセンサシステムを用いた関節トルク推定の歩行解析への適用に関する研究
伊藤和朗; 廣瀬圭(テック技販; 伊藤彰人; 辻内伸好; 近藤亜希子; テック技販; 仲道 泰洋
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2020, 2020年11月 - 帯状慣性センサを用いたカーブ時の座面形状推定
吉見恭平; 廣瀬圭(テック技販; 辻内伸好; 伊藤彰人; 仲道泰洋
日本機械学会シンポジウム:スポーツ工学・ヒューマンダイナミクス2020, 2020年11月 - 荷重免荷時の歩行動作が筋活動に与える影響
辻裕志; 辻内伸好; 伊藤彰人; 大平充宣; 上林清孝
日本機械学会2020年度年次大会, 2020年09月 - 油圧ショベルのスケールモデルによる自動掘削時の軌道追従精度向上に向けた油圧制御法の検討
伊藤惇浩; 辻内伸好; 伊藤彰人; 平野貴司
日本機械学会2020年度年次大会, 2020年09月 - スイング中のトルクの振動解析結果と力学モデルによるスイング推定手法の開発
岡崎弘祐; 住友ゴム工業; 辻内伸好; 伊藤彰人; 杉本翔; 植田勝彦; ゴム工; 中村佑斗
日本機械学会Dynamics and Design Conference 2020, 2020年09月 - リンク・クランク機構を用いた鉛直免震装置の特性検証と性能評価
前井雄太; 辻内伸好; 伊藤彰人; 宇高希; 安田正志
日本機械学会Dynamics and Design Conference 2020, 2020年09月 - 股関節角度に基づくワイヤ型アシストスーツのアシストタイミング決定手法の提案
張浚源; 村井大海; 辻内伸好; 伊藤彰人; 井上剛; 産業技術総合研究所; 小澤順; 産業技術総合研究所; 村上健太(パナソニック; 半沢文也(ATOU; 岸本一昭(ATO
日本機械学会Dynamics and Design Conference 2020, 2020年09月 - 障害物回避を考慮した冗長マニピュレータのダイレクトティーチング
伊藤彰人; 辻内伸好; 今井隆博; 浦公平
日本機械学会ロボティクス・メカトロニクス講演会2020, 2020年05月 - 負荷制御型トレッドミルによる歩行解析
伊藤彰人,辻内伸好,大内陽,廣瀬圭
第65回日本宇宙航空環境医学会大会, 2019年11月, 口頭発表(一般) - Hydraulic Control Design for Digging Trajectory Tracking of Scale Model Excavator
T.Hirano, A.Ito, N.Tsujiuchi, A.Ito, T.Yoshida, F.Kuratani, and H.Andou
APVC2019 the 18th Asia-Pacific Vibration Conference, 2019年11月, 口頭発表(一般) - Applicability of Automated Digging Algorithm on Sloping Ground for Hydraulic Excavators
T.Hirano, T.Yoshida(University of Fukui), N.Tsujiuchi, A.Ito, F.Kuratani, and H.Andou
APVC2019 the 18th Asia-Pacific Vibration Conference, 2019年11月, 口頭発表(一般) - 拡張カルマンフィルタを用いた慣性センサによる手指運動計測
北野 敬祐; 伊藤 彰人; 辻内 伸好
生活生命支援医療福祉工学系学会連合大会講演要旨集, 2019年09月, 2019年09月, 2019年09月, (一社)ライフサポート学会 - Evaluation of Adaptive Evacuation Guide Sign by using enlarged Evacuation Simulation at an Actual floor plan of Underground Area
Y.Kasahara, A.Ito, N.Tsujiuchi, H.Horii(Kokushikan University), and K.Kitano
13th International Conference on Urban Regeneration and Sustainability, 2019年09月 - Hand Motion Measurement using Inertial Sensor System and Accurate Improvement by Extended Kalman Filter
K.Kitano, A.Ito, and N.Tsujiuchi
41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2019年07月, 口頭発表(一般) - Fundamental study of an adaptive evacuation guide sign by using a discrete element method-based simulation
H.Horii(Kokushikan University), A.Ito, N.Tsujiuchi, T.Fukuda, and Y.Kasahara
WIT Transactions on Engineering Sciences, 2019年06月, 口頭発表(一般) - Investigation and Improvement of a Bouncing Torsional Vibration in Automotive Dual Mass Flywheel by Combining Testing and 1D CAE Modeling Approach
Y.Yamakaji, D.Yoshimoto, N.Tsujiuchi, and A.Ito
SAE 2019 Noise and Vibration Conference and Exhibition, 2019年06月, 口頭発表(一般) - Study of Human Gait Characteristics under Different Low-Gravity Conditions
L.Lamassoure, K.Kitano, K.Araki, A.Ito, K.Kamibayashi, Y.Ohira, and N.Tsujiuchi
40th Annual Meeting of International Society for Gravitational Physiology (ISGP2019), 2019年05月, 口頭発表(一般) - Estimation of Hand Position and Posture using Inertial Sensors and its Application to Robot Teaching System
A.Ito; N.Tsujiuchi; K.Horio; K.Kitano
IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND BIOMIMETICS, 2018年12月, 口頭発表(一般) - 慣性センサによる人の運動計測と医療・福祉分野への応用
伊藤 彰人
第19回秋季技術交流フォーラム, 2018年10月20日, 口頭発表(招待・特別) - Modeling of Hand and Forearm Link using Inertial Sensors
K.Kitano; A.Ito; N.Tsujiuchi
40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2018年07月, ポスター発表 - Estimation of Joint Center and Measurement of Finger Motion by Inertial Sensors
K.Kitano; A.Ito; N.Tsujiuchi; S.Wakida(Tec Gih
38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2016年08月, 口頭発表(一般) - Multipurpose Optimization of Camera Placement and Application to Random Bin-Picking
A.Ito; N.Tsujiuchi; Y.Okada
Proceedings IECON2015-41st Annual Conference of the IEEE Industrial Electronics Society, 2015年11月, 口頭発表(一般) - Multipurpose Optimization of Camera Position for Robot Vision by Considering Calibration Accuracy
A.Ito; N.Tsujiuchi; Y.Okada; R.Kojima
Proceedings IECON2014-40th Annual Conference of the IEEE Industrial Electronics Society, 2014年10月, 口頭発表(一般) - 受動歩行における踵・足首・足趾を有する足の有効性
Dynamics and Design Conference 2009 論文集, 2009年 - ロボット指用小型3軸力センサの構造最適化
Dynamics and Design Conference 2008 論文集, 2008年 - ロボットハンドの指の腹に装着可能な薄型4 軸力覚センサの性能評価
Dynamics and Design Conference 2008 論文集, 2008年 - ロボットハンドの指先に装着可能な薄型4軸力覚センサ2倍モデルの性能評価
ロボティクス・メカトロニクス講演会’08 講演論文集, 2008年 - ロボット指用小型3軸力センサの開発
関西支部 第83期定時総会講演会 講演論文集, 2008年 - ロボットハンドの指先に装着可能な薄型4軸力覚センサの開発
関西支部 第83期定時総会講演会 講演論文集, 2008年 - Performance Evaluation of the Thin Type Four-Axis Force/Moment Sensor as Two-Times Model for the Robot Hand’s Fingertip
Y. Hayashi; N. Tsujiuchi; T. Koizumi; H. Oshima; A. Ito; そ
The 34th Annual Conference of the IEEE Industrial Electronics Society PROCEEDINGS IEEE-IECON'2008, 2008年 - Development of Distributed-Type Tri-Axial Force Sensor of Robot Finger
A. Ito; N. Tsujiuchi; T. Koizumi; H. Oshima; T. Hiroshima; その他
Proceedings of the 9th International Conference on Motion and Vibration Control, 2008年 - ロボット指用分布型触覚センサのための小型センサ素子の開発とその特性評価
第10回 「運動と振動の制御シンポジウム」 講演論文集, 2007年 - Structural Optimization of Three-Axis Tactile Sensor Using DOE
H.Oshima; N.Tsujiuchi; T.Koizumi; A.Ito; その
International Conference on Computational Methods, 2007年 - Development and Characteristic Analysis for Thin-type Triaxial Force Senso
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; Y.Tsuchiya
Proceedings of the IMAC-XXV, 2007年 - Development and Structure Evaluation of Small Sensor Element for Distributed-Type Tri-Axial Force Sensor of Robot Finger
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
Proc. of IEEE International Conference on Robotics and Biomimetics, 2007年 - 3分力触覚センサを用いた並進滑り及び回転滑りの検知
第9回 「運動と振動の制御シンポジウム」 講演論文集, 2006年 - 実験計画法を用いた三軸触覚センサの構造最適化
Dynamics and Design Conference 2006 論文集, 2006年 - Acquisition of Slip Phenomenon for Developed Distributed-type Force Sensor
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
Proc. of the 8th International Conference on Motion and Vibration Control, 2006年 - Verification of Tactile Sensor for Manipulator
H.Oshima; N.Tsujiuchi; T.Koizumi; A.Ito; その
Proc. of IEEE International Conference on Robotics and Biomimetics, 2006年 - Acquisition of Slip Phenomenon between Developed Distributed-Type Force Sensor and the Contacted Object
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
The 32nd Annual Conference of the IEEE Industrial Electronics Society PROCEEDINGS IEEE-IECON'2006, 2006年 - 3分力触覚センサを用いた並進滑り及び回転滑りの検知
第9回 「運動と振動の制御シンポジウム」 講演論文集, 2005年 - Contact Condition Detection by Tactile Sensor
H.Oshima; N.Tsujiuchi; T.Koizumi; A.Ito; その
Proceedings of the IMAC-XXIII, 2005年 - Characteristics of Tactile Sensor and Movement Detection of Attached Object
H.Oshima; N.Tsujiuchi; T.Koizumi; A.Ito; その
The 31st Annual Conference of the IEEE Industrial Electronics Society PROCEEDINGS IEEE-IECON'2005, 2005年 - The Development of Distributed-type Force Sensor Applicable to the Sports Engineering
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
The Impact of Technology on Sports, 2005年 - Relative Movement Evaluation between Developed Distributed-Type Tactile Sensor and the Contacting Object
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
Proc. of 2005 IEEE/RSJ International Conference on Intelligent Robots & Systems, 2005年 - 分布型センサのスポーツ工学分野への適用
ジョイントシンポジウム2004 スポーツ工学シンポジウム 講演論文集, 2004年 - マトリクス型触覚センサによる接触と滑りの検出
Dynamics and Design Conference 2004 論文集, 2004年 - 滑り検知が可能な触覚センサの開発
ロボティクス・メカトロニクス講演会’04 講演論文集, 2004年 - 高分解能センサを用いた接触解析及び滑り検知
関西支部 第79期定時総会講演会 講演論文集, 2004年 - Contact Analysis and Slip Detection by using the Tactile Sensor
N.Tsujiuchi; T.Koizumi; A.Ito; H.Oshima; その他
Proc. of the 7th International Conference on Motion and Vibration Control, 2004年 - Slip Detection with Distributed-Type Tactile Sensor
A.Ito; N.Tsujiuchi; T.Koizumi; H.Oshima; その他
Proc. of 2004 IEEE/RSJ International Conference on Intelligent Robots & Systems, 2004年 - Slip Detection and Error Analysis of the Tactile Sensor
H.Oshima; N.Tsujiuchi; T.Koizumi; A.Ito; その
International Conference on Computational Methods, 2004年 - 触覚センサの開発とその静特性
第8回 「運動と振動の制御シンポジウム」 講演論文集, 2003年
共同研究・競争的資金等の研究課題
- 中高年女性の非侵襲的計測値を用いた運動量と関節負荷量の推定モデルの開発と評価
中垣 明美; 松原 真己; 伊藤 彰人
日本学術振興会, 科学研究費助成事業, 2025年04月 -2029年03月, 基盤研究(C), 名古屋女子大学短期大学部 - 避難誘導装置と防災センサの知能化と分散協調処理による動的避難誘導システムの構築
堀井 宏祐; 辻内 伸好; 伊藤 彰人; 倉島 優一; 廣川 雄一
日本学術振興会, 科学研究費助成事業, 2022年04月 -2025年03月, 基盤研究(C), 国士舘大学 - 人の行動理解に基づく人とロボットの協調動作の実現
伊藤 彰人; 辻内 伸好
産業ロボットにおいても,ISOの安全基準の改正により,基準を満たせば安全柵のない状況で人の作業を補助し,人と同じ空間で動作するロボットが実現可能になっている.今後,ロボットは常に変化する周りの環境や人の動作から,人の動きの意図を読み取り,自身の動作を決定し,人と協調作業を行う必要がある.そこで,本研究では,カメラを用いた計測では死角になり計測できなかった手指の運動を慣性センサを用いた手指運動計測システムを開発することで計測し,人の手指の動作識別を行い,人の作業の進捗状況を把握した.その情報を基に,ロボットの動作させることで協調作業を実現した., 日本学術振興会, 科学研究費助成事業 基盤研究(C), 2019年04月 -2022年03月, 基盤研究(C), 同志社大学 - 無重力環境や老化による筋機能低下の原因解明と予防装置の開発
辻内 伸好; 大平 充宣; 伊藤 彰人; 上林 清孝
骨格筋は骨格筋量を維持するだけで骨萎縮の予防法となるのみならず.加齢性筋肉減弱症(サルコペニア)など様々な生体機能の退行性変化の予防が期待できる.そこで,申請者らの開発したウエアラブル計測装置を用いて低重力模擬環境下で高精度な歩行実験を実施した.さらに実験結果と人体筋骨格モデルを用いたシミュレーションを比較することで,廃用性筋萎縮の要因となる仮説を検証し,ヒラメ筋など下肢の抗重力筋の筋活動度が向上可能な自走式トレッドミルを開発した., 日本学術振興会, 科学研究費助成事業, 2017年04月 -2021年03月, 基盤研究(B), 同志社大学 - 無重力環境や老化による筋機能低下のモデル化と予防装置の提案
辻内 伸好; 伊藤 彰人
月面では1/6-G,火星では3/8-Gといった地球外環境の運動シミュレーションには,空気圧により体重の最大20 %の免荷状態で利用可能な反重力トレッドミルが有効である.しかし,反重力トレッドミルでは床反力を計測できず,エアバックで覆われているため光学式運動計測機器は使用できない.そこで申請者らが開発した,ウエアラブル床反力計と,下肢に着用する姿勢センサにより構成される装着型運動計測装置を使用した.その結果,床反力と関節角度の測定結果から,歩行動作特性は,荷重率40 %と60 %の間で大きく変化し,免荷するほど浮き気味でかつ緩やかな脚運びのつま先立ち歩行になることが定量的に明らかとなった., 日本学術振興会, 科学研究費助成事業, 2016年04月 -2018年03月, 挑戦的萌芽研究, 同志社大学 - バイオフィードバックによる歩行障害者のリハビリテーション効率の向上
辻内 伸好; 井上 喜雄; 伊藤 彰人
歩行訓練に関してはトレッドミルが用いられるが,運動解析に基づく歩行評価指標の欠如から,運動学習効率を定量的に評価することができない.そこで,速度制御による負荷変化が可能な左右分離型トレッドミルを開発し,有効な歩行評価指標を用いて,指標と実際の歩行との相違点を視覚的に提示することによって,歩行障害者のバイオフィードバックを促進し,リハビリテーション効率を向上した., 日本学術振興会, 科学研究費助成事業, 2013年04月 -2017年03月, 基盤研究(B), 同志社大学 - 環境との相互作用を計測可能なウエアラブル全身運動計測システムの開発
伊藤 彰人
科学研究費補助金 若手(B), 2015年04月 -2017年03月, 研究代表者, 競争的資金 - 関節リウマチハンドセラピーの治療効果評価用シミュレーション機能モデルの開発
辻内 伸好; 伊藤 彰人
関節リウマチは免疫系の異常による関節炎から,手指変形などの機能障害を引き起こす疾患である.ハンドセラピーによるリハビリテーションは最も低リスクの治療法であるが,継続的な施術を必要とする.しかし,患者の通院困難(身体的,金銭的)やセラピストの人手不足といった問題があった.そのため,自宅でも可能な中手指節(MP)関節亜脱臼用リハビリテーション装置の開発が考案された.この開発に当たり,ハンドセラピーをバイオメカニクス的な視点から,その力学を解析することが必要となった.本研究ではハンドセラピーをモーションキャプチャーと指先力センサで計測し,その計測値から関節のリハビリ効果を評価するモデルを考案した., 日本学術振興会, 科学研究費助成事業, 2014年04月 -2016年03月, 挑戦的萌芽研究, 同志社大学 - ZMP 理論に基づく歩行が可能な足形状を有する受動歩行規範型 二足歩行ロボットの開発
古屋 信幸; 伊藤 彰人
二足歩行ロボットの工学的応用を考えた場合,エネルギー効率を向上させる必要がある.そこで,本研究では,人を模擬した足形状の踵,足趾を持つ受動歩行を実現する二足歩行ロボットの開発を目的とした.シミュレーションにより提案する足形状を持つ受動歩行機の有効性を示し,実機によって周期的な歩行が可能であることを示した.マルチボディダイナミクス系ソフトウェアを用いて準受動歩行制御系を構築し,その有効性を示した., 日本学術振興会, 科学研究費助成事業, 2010年 -2012年, 基盤研究(C), 山梨大学 - 分布型触覚センサを用いたマニピュレーションシステムに関する研究
伊藤 彰人
特別研究員奨励費, 2007年04月 -2008年03月, 研究代表者, 競争的資金
研究シーズ
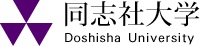
- 幼児拘束装置における アクティブ制御による安全性向上の検証キーワード:幼児拘束装置:衝突安全:アクティブ制御: 衝突シミュレーション:多目的最適化研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:幼児に対する幼児拘束装置(CRS)の使用が義務化された現在、更なる安全性の向上や誤使用の防止などが求められている。近年、成人用の拘束装置ではハーネスの挙動を制御することにより安全性が向上している。したがって、CRSにもハーネスを制御する機構を導入することにより安全性が向上すると考えられる。そこでCRSを乗員安全解析ソフトウエアMADYMOによってモデル化し、ダミーモデルと設計した制御器モデルを付加し、衝突シミュレーションを行う。制御を与えることにより傷害危険性の高い頭部や頸部などの傷害値がどの程度低減するかを確認する。使用用途、応用例等:幼児拘束装置における効果的な制御手法の開発備考:制御のパラメータを変化させて衝突シミュレーションを実行することができるため、制御器の特性を最適化することが可能である。
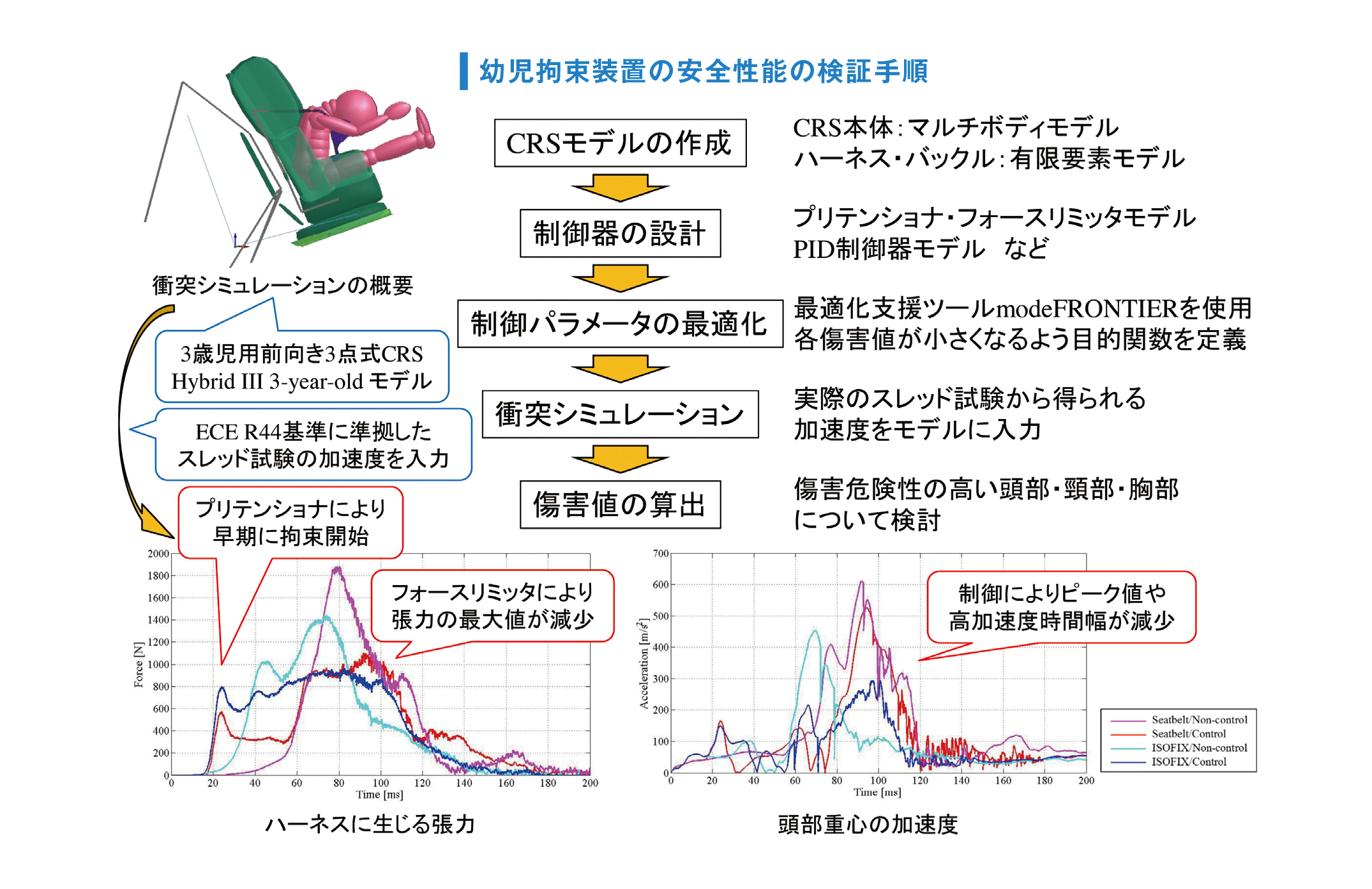 振動入力に対する 幼児頭蓋内の動的応答と損傷評価キーワード:急性硬膜下血腫:有限要素モデル:揺さぶり振動: 脳挙動:架橋静脈:幼児脳研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:幼児を揺さぶることで生じる頭部外傷(幼児揺さぶられ症候群と呼ばれる、SBS)において、最も重篤なものに急性硬膜下血腫がある。これに対して、その発生メカニズムを科学的に解明することが求められている。急性硬膜下血腫の直接的な発生原因は脳と頭蓋骨の相対回転運動によりそれらを繋ぐ架橋静脈が破断することである。そこで、本研究では大型加振機と6ヵ月児ダミーを用いて揺さぶり振動実験を行った。また、6ヵ月児の頭部有限要素モデルを用いて揺さぶり動作を再現した有限要素解析を行った。更に、6ヵ月の幼児頭部有限要素モデルを構築しシミュレーションを行った。使用用途、応用例等:急性硬膜下血腫は重篤な頭部外傷を引き起こすにも関わらず、幼児への虐待行為は主に家庭内で発生するため第三者からの正確な証言が得られない。そのため、急性硬膜下血腫の発生原因に対して医療機関等は明確な根拠に基づいた判別ができず経験や勘に依存している。そこで、幼児の急性硬膜下血腫の発生メカニズムを力学的に解明し、科学的根拠を与えることで虐待と不慮の事故との判別基準として用いる。
振動入力に対する 幼児頭蓋内の動的応答と損傷評価キーワード:急性硬膜下血腫:有限要素モデル:揺さぶり振動: 脳挙動:架橋静脈:幼児脳研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:幼児を揺さぶることで生じる頭部外傷(幼児揺さぶられ症候群と呼ばれる、SBS)において、最も重篤なものに急性硬膜下血腫がある。これに対して、その発生メカニズムを科学的に解明することが求められている。急性硬膜下血腫の直接的な発生原因は脳と頭蓋骨の相対回転運動によりそれらを繋ぐ架橋静脈が破断することである。そこで、本研究では大型加振機と6ヵ月児ダミーを用いて揺さぶり振動実験を行った。また、6ヵ月児の頭部有限要素モデルを用いて揺さぶり動作を再現した有限要素解析を行った。更に、6ヵ月の幼児頭部有限要素モデルを構築しシミュレーションを行った。使用用途、応用例等:急性硬膜下血腫は重篤な頭部外傷を引き起こすにも関わらず、幼児への虐待行為は主に家庭内で発生するため第三者からの正確な証言が得られない。そのため、急性硬膜下血腫の発生原因に対して医療機関等は明確な根拠に基づいた判別ができず経験や勘に依存している。そこで、幼児の急性硬膜下血腫の発生メカニズムを力学的に解明し、科学的根拠を与えることで虐待と不慮の事故との判別基準として用いる。 有限要素法を用いた車体の伝達経路解析キーワード:共振:有限要素法:伝達経路解析: シミュレーション研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:構造物の振動騒音低減のためには、構造変更により構造物の振動特性を操作し、共振現象の影響を小さくすることが一般的である。近年では、CAE技術の発達により有限要素法による現象予測の精度と信頼性が向上し、共振現象の特性を把握することが可能になった。しかしながら、自動車のような部品点数の多い構造物の場合には、構造物内での振動伝達が複雑なため、現象予測による定性的な評価だけでは効果的な対策立案には多くの時間を要する。そこで、構造物の振動特性を定量的に評価できる伝達経路解析を用いて、自動車の振動伝達を明確にする。使用用途、応用例等:自動車などの機械構造物ではエンジン振動が様々な経路を伝達し、パネル部などが共振することでこもり音などの騒音が発生する。しかし、伝達経路部分の構造は複雑に入り組んでいるため、振動伝達特性を把握し、対策することが難しい。 そこで本手法を伝達経路部に適用し、パネル振動に大きく寄与する箇所を特定する。特定した箇所の剛性や質量を変更することで振動低減を図る。備考:定量的な判断が可能なため、術者のノウハウに依存しない解析が可能である。
有限要素法を用いた車体の伝達経路解析キーワード:共振:有限要素法:伝達経路解析: シミュレーション研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:構造物の振動騒音低減のためには、構造変更により構造物の振動特性を操作し、共振現象の影響を小さくすることが一般的である。近年では、CAE技術の発達により有限要素法による現象予測の精度と信頼性が向上し、共振現象の特性を把握することが可能になった。しかしながら、自動車のような部品点数の多い構造物の場合には、構造物内での振動伝達が複雑なため、現象予測による定性的な評価だけでは効果的な対策立案には多くの時間を要する。そこで、構造物の振動特性を定量的に評価できる伝達経路解析を用いて、自動車の振動伝達を明確にする。使用用途、応用例等:自動車などの機械構造物ではエンジン振動が様々な経路を伝達し、パネル部などが共振することでこもり音などの騒音が発生する。しかし、伝達経路部分の構造は複雑に入り組んでいるため、振動伝達特性を把握し、対策することが難しい。 そこで本手法を伝達経路部に適用し、パネル振動に大きく寄与する箇所を特定する。特定した箇所の剛性や質量を変更することで振動低減を図る。備考:定量的な判断が可能なため、術者のノウハウに依存しない解析が可能である。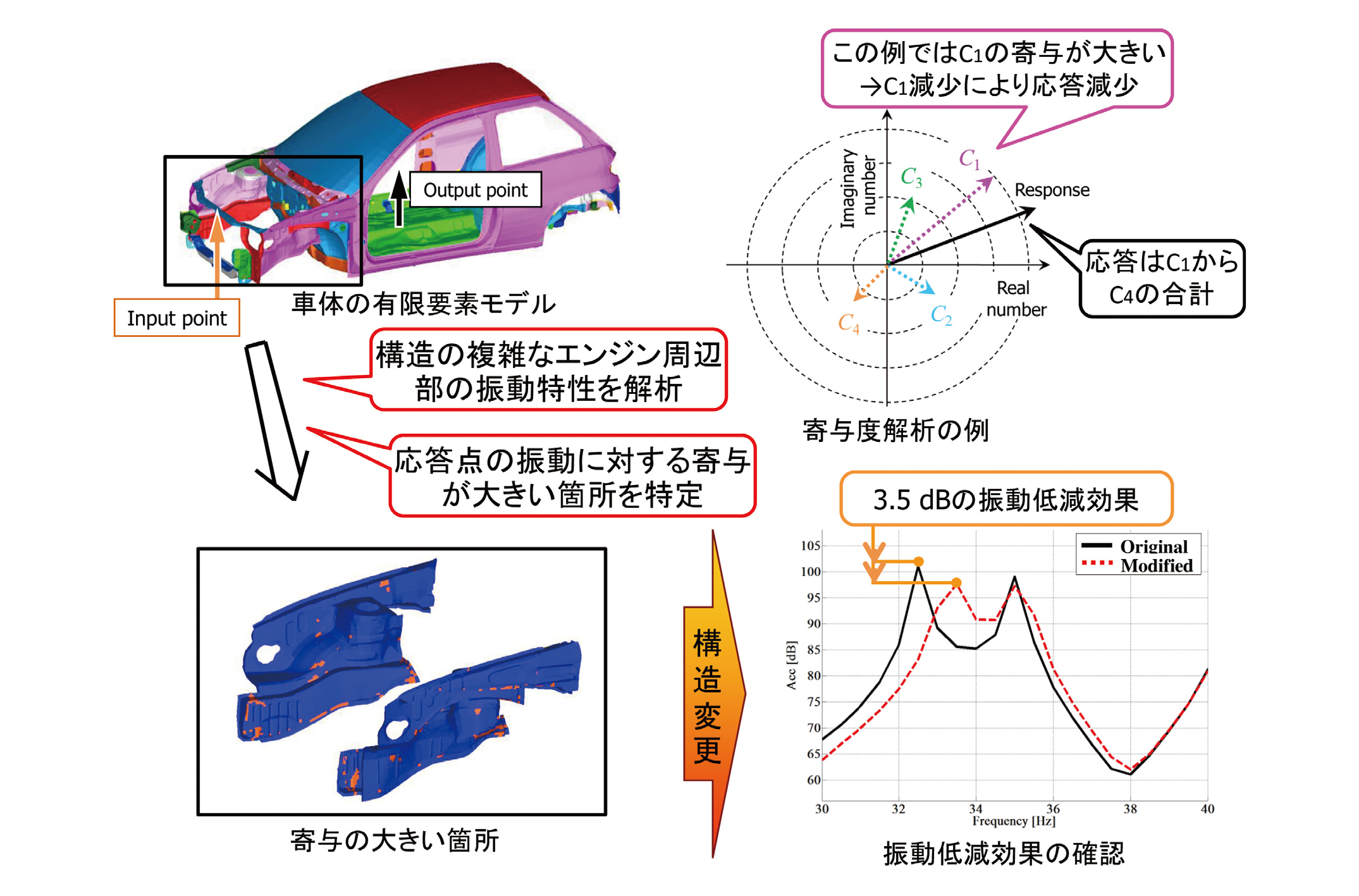 Tip-in/Tip-out時における 車両前後振動の解析キーワード:駆動系:Tip-in:Tip-out: シミュレーション:DMF研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年の自動車には基本性能の充足・拡大にとどまらず、豊かな社会を反映してますます静粛性やドライバビリティの改善が求められている。こうした背景のもと、駆動系のトーショナルダンパである3マスフライホイールに対する要求も多様化しつつある。駆動系捩り振動にかかわる問題として、Tip-in/Tip-out時に発生する低周波の車両前後振動が挙げられる。この振動はアクセル操作によるエンジンの急激なトルク変動により、駆動系、懸架系、車体系の振動が励起されて発生するものである。本研究では、乗用車のシミュレーションモデルを構築し、2マスフライホイールの車両前後振動に対する影響を明らかにすることで、Tip-in/Tip-out時の車両前後振動の低減を行う。使用用途、応用例等:構築したシミュレーションモデルによって、車両仕様がTip-in/Tip-out時の車両前後振動に及ぼす影響を把握すること ができる。したがって、開発早期に車両前後振動への対策を考慮した設計が可能となる。備考:従来、Tip-in/Tip-out時の車両前後振動の対策としてエンジン制御やドライブシャフトなどの車両仕様の変更がなされてきたが、本研究では、駆動系にトーショナルダンパである2マスフライホイールによって低減する手法を提案した。 しかし、車両前後振動への対策を行うと、2マスフライホイール本来の目的である、エンジン回転変動低減性能が悪化する。したがって、エンジン回転変動への低減性能を損なわずに車両前後振動を低減する手法を考案する必要がある。
Tip-in/Tip-out時における 車両前後振動の解析キーワード:駆動系:Tip-in:Tip-out: シミュレーション:DMF研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年の自動車には基本性能の充足・拡大にとどまらず、豊かな社会を反映してますます静粛性やドライバビリティの改善が求められている。こうした背景のもと、駆動系のトーショナルダンパである3マスフライホイールに対する要求も多様化しつつある。駆動系捩り振動にかかわる問題として、Tip-in/Tip-out時に発生する低周波の車両前後振動が挙げられる。この振動はアクセル操作によるエンジンの急激なトルク変動により、駆動系、懸架系、車体系の振動が励起されて発生するものである。本研究では、乗用車のシミュレーションモデルを構築し、2マスフライホイールの車両前後振動に対する影響を明らかにすることで、Tip-in/Tip-out時の車両前後振動の低減を行う。使用用途、応用例等:構築したシミュレーションモデルによって、車両仕様がTip-in/Tip-out時の車両前後振動に及ぼす影響を把握すること ができる。したがって、開発早期に車両前後振動への対策を考慮した設計が可能となる。備考:従来、Tip-in/Tip-out時の車両前後振動の対策としてエンジン制御やドライブシャフトなどの車両仕様の変更がなされてきたが、本研究では、駆動系にトーショナルダンパである2マスフライホイールによって低減する手法を提案した。 しかし、車両前後振動への対策を行うと、2マスフライホイール本来の目的である、エンジン回転変動低減性能が悪化する。したがって、エンジン回転変動への低減性能を損なわずに車両前後振動を低減する手法を考案する必要がある。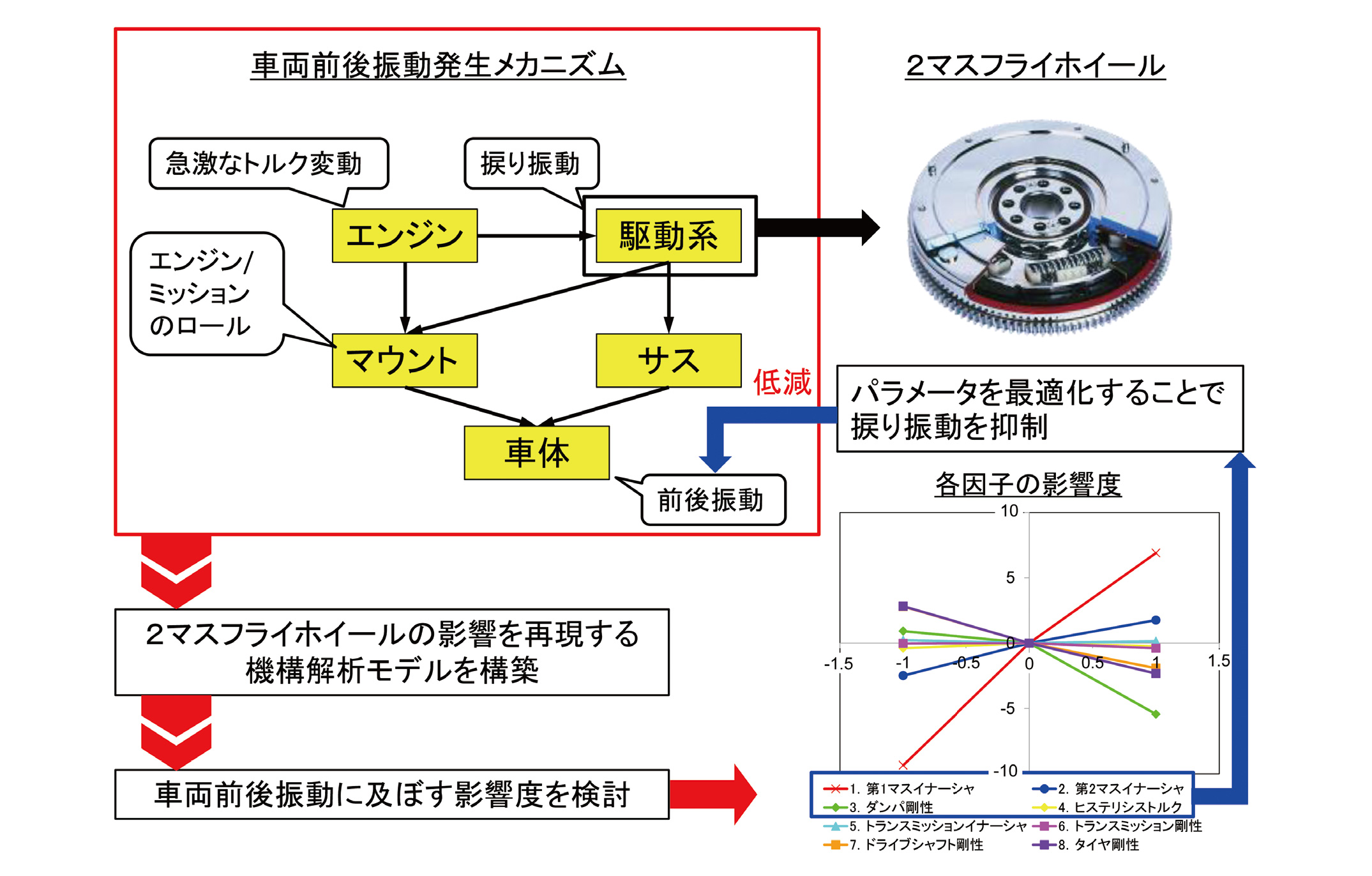 Rayleighの方法による タイヤ横曲げモードの振動解析キーワード:タイヤ:固有振動数:Rayleighの方法研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ロードノイズに寄与するタイヤ振動特性に関する研究は数多く行われているが、径方向のタイヤ振動に着目した研究が主である。しかしながら、車軸振動方向によって振動励起に寄与するタイヤ固有モードが異なり、包括的なタイヤ振動特性の把握が求められている。特に、横方向車軸振動を励起する横並進モード、横曲げモードの振動挙動解析についてはあまり報告されておらず、径方向モードに比べ明らかにされていない。本研究では横並進モード、横曲げモードに着目し、その力学モデルより解析的に振動挙動を解明することを目的とする。力学モデルには円筒シェルを用い、不伸張変形仮定が成立するものとして固有関数を導出する。ここでは、固有振動数の導出にはRayleighの方法を用い、タイヤばね付きリングモデルにより横曲げモードを評価できるのか検証する。使用用途、応用例等:本研究で構築した低自由度の力学モデルを用いた解析的手法は、適用できる周波数範囲が限定されるという欠点を有するが、タイヤの物理的な部材特性を基にタイヤの力学特性を導いているため、タイヤの部材と力学特性との関連がわかり易く、タイヤの設計時に解析的なアプローチが可能となる。備考:一般的にタイヤ振動解析に使われる有限要素モデルに対して、タイヤ各部材パラメータと振動特性の関係が把握しやすい。
Rayleighの方法による タイヤ横曲げモードの振動解析キーワード:タイヤ:固有振動数:Rayleighの方法研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ロードノイズに寄与するタイヤ振動特性に関する研究は数多く行われているが、径方向のタイヤ振動に着目した研究が主である。しかしながら、車軸振動方向によって振動励起に寄与するタイヤ固有モードが異なり、包括的なタイヤ振動特性の把握が求められている。特に、横方向車軸振動を励起する横並進モード、横曲げモードの振動挙動解析についてはあまり報告されておらず、径方向モードに比べ明らかにされていない。本研究では横並進モード、横曲げモードに着目し、その力学モデルより解析的に振動挙動を解明することを目的とする。力学モデルには円筒シェルを用い、不伸張変形仮定が成立するものとして固有関数を導出する。ここでは、固有振動数の導出にはRayleighの方法を用い、タイヤばね付きリングモデルにより横曲げモードを評価できるのか検証する。使用用途、応用例等:本研究で構築した低自由度の力学モデルを用いた解析的手法は、適用できる周波数範囲が限定されるという欠点を有するが、タイヤの物理的な部材特性を基にタイヤの力学特性を導いているため、タイヤの部材と力学特性との関連がわかり易く、タイヤの設計時に解析的なアプローチが可能となる。備考:一般的にタイヤ振動解析に使われる有限要素モデルに対して、タイヤ各部材パラメータと振動特性の関係が把握しやすい。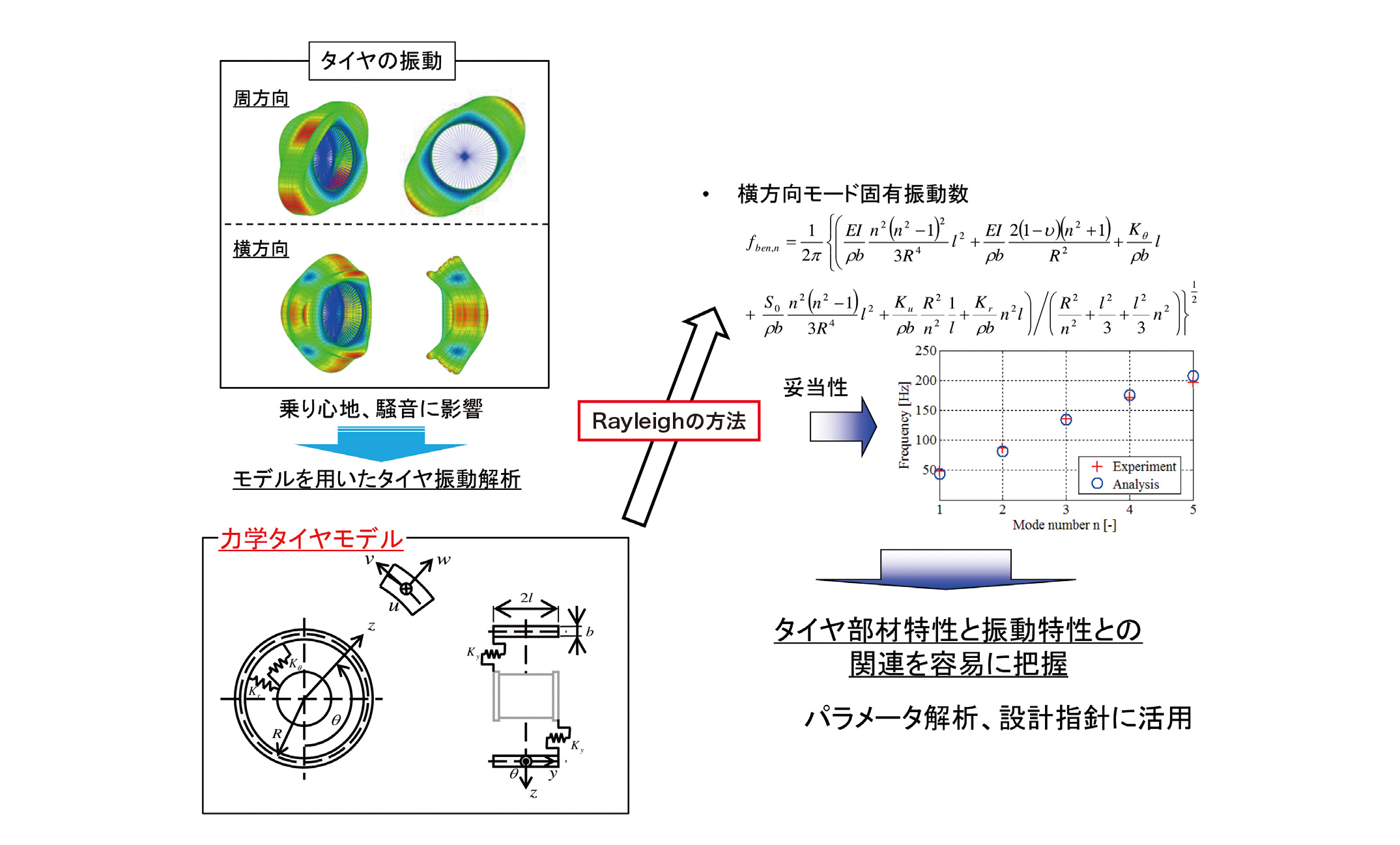 特許情報:特願2013-233855その他関連情報:2014年5月23日 自動車技術会春季学術講演会において発表トレッドミルによる運動訓練システムを用いた歩行・走行時の動力学特性解析キーワード:トレッドミル:フォースプレート:バイオメカニクス:運動解析研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:下肢の運動解析に用いられる装置の一種として、トレッドミルが挙げられる。同一空間上を運動するという特性から、省スペースでの計測が可能であるため、自宅、病院、スポーツジムでリハビリ用およびトレーニング用として設置されている。本研究では、歩行および長距離走における走行トレーニングに着目する。スポーツ用高速トレッドミルを計測装置として使用し、被験者の両足にベルト速度による負荷を課す歩行・走行計測実験を行う。計測の際、動作解析をするために、対象物の3次元計測が可能なカメラと床反力計を併用する。トレッドミル上の歩行と走行における床反力、関節角度および関節モーメントについて検証し、運動速度による影響がどのように関係しているかを比較する。使用用途、応用例等:身体障害から機能を回復させるためのリハビリテーションや歩行・走行の運動トレーニング等の実際の訓練技術として適用する。備考:実験および運動解析によって算出された評価指標と、床反力計から得られるピッチ、ストライド、力の情報を、被験者にリアルタイムで提示するシステムを目指す。
特許情報:特願2013-233855その他関連情報:2014年5月23日 自動車技術会春季学術講演会において発表トレッドミルによる運動訓練システムを用いた歩行・走行時の動力学特性解析キーワード:トレッドミル:フォースプレート:バイオメカニクス:運動解析研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:下肢の運動解析に用いられる装置の一種として、トレッドミルが挙げられる。同一空間上を運動するという特性から、省スペースでの計測が可能であるため、自宅、病院、スポーツジムでリハビリ用およびトレーニング用として設置されている。本研究では、歩行および長距離走における走行トレーニングに着目する。スポーツ用高速トレッドミルを計測装置として使用し、被験者の両足にベルト速度による負荷を課す歩行・走行計測実験を行う。計測の際、動作解析をするために、対象物の3次元計測が可能なカメラと床反力計を併用する。トレッドミル上の歩行と走行における床反力、関節角度および関節モーメントについて検証し、運動速度による影響がどのように関係しているかを比較する。使用用途、応用例等:身体障害から機能を回復させるためのリハビリテーションや歩行・走行の運動トレーニング等の実際の訓練技術として適用する。備考:実験および運動解析によって算出された評価指標と、床反力計から得られるピッチ、ストライド、力の情報を、被験者にリアルタイムで提示するシステムを目指す。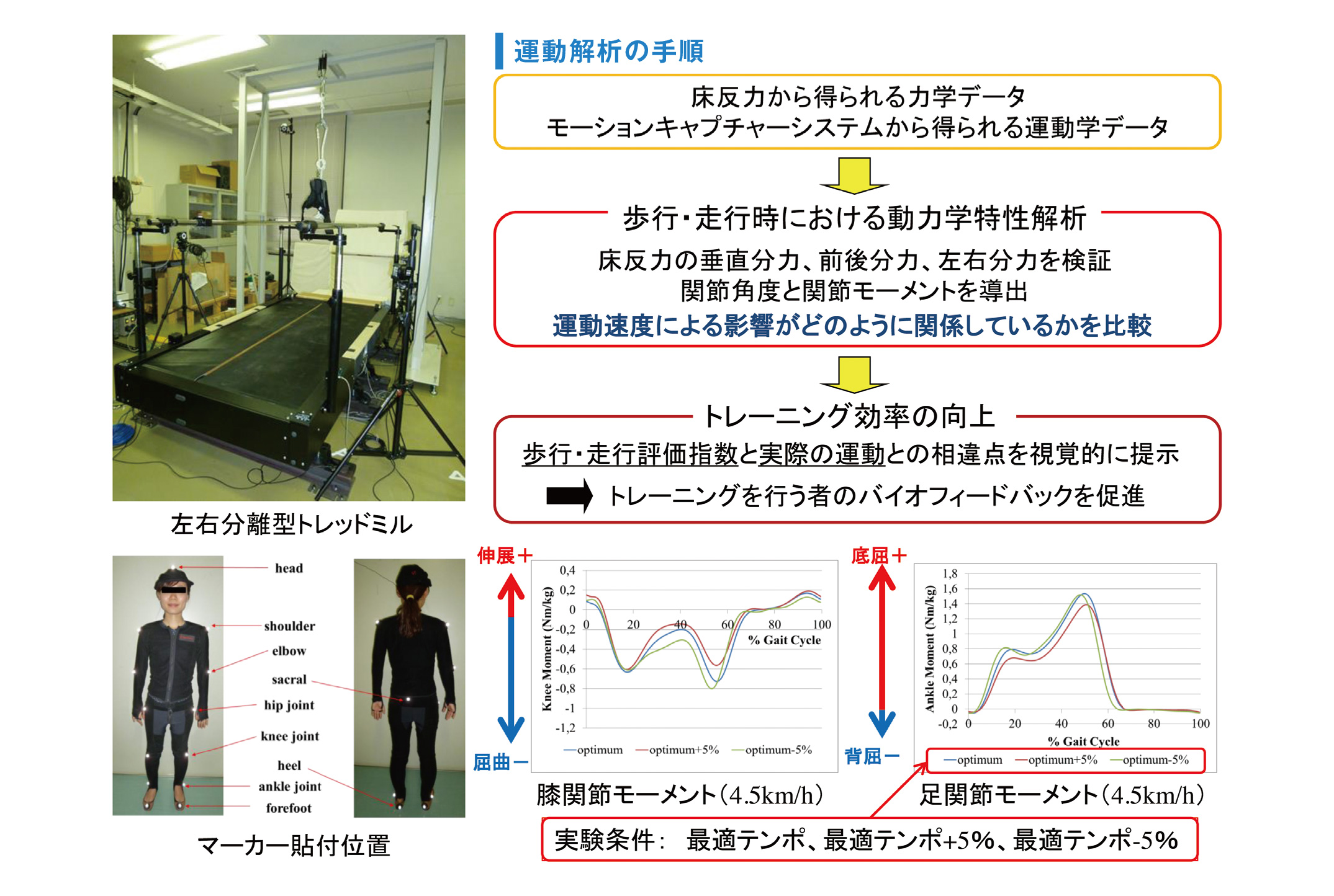 特許情報:特願2008-306913, 特願2010-021672LRFとカメラによる ランダム・ビン・ピッキングシステムの構築キーワード:カメラ校正:レーザ距離センサ: ランダム・ビン・ピッキング:空気圧ロボットハンド: 3D形状ベースマッチング研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ヒトの代替として作業を行う自律ロボットの需要は世界の生産現場で高まっている。周囲の環境に応じてばら積みピッキングという高度な作業を自律ロボットに行わせるためには、外部情報の変化を検出する外界センサが必要となる。そこで、外界センサとしてレーザレンジファインダ(LRF)およびカメラを産業用ロボットに導入する。本研究では、LRFおよび2Dカメラの組み合わせによる低コストのばら積みピッキングシステムの構築を目的とする。ばら積み物体が設置された作業領域をLRFでスキャンし、その三次元形状を復元した後、2Dカメラによる3D形状ベースパターンマッチングを実行することでその位置・姿勢を特定し、空気圧ロボットハンドの特性を生かした把持作業を行う。使用用途、応用例等:このシステムの使用用途は、ごみ処理場におけるごみの自動分別作業や、生産現場におけるばら積み部品の自動選別作業等の、さまざまなばら積み物体の選別作業への適用である。従来のばら積みピッキングシステムは、高価なレーザや3Dカメラ、正確な位置算出技術を必要としていた。しかし、本システムが実現できれば、算出する三次元位置に多少の誤差を含んでも、空気圧ハンドの柔軟性を生かすことで、柔軟な把持作業が可能で、かつ低コストなばら積みピッキングシステムとなる。
特許情報:特願2008-306913, 特願2010-021672LRFとカメラによる ランダム・ビン・ピッキングシステムの構築キーワード:カメラ校正:レーザ距離センサ: ランダム・ビン・ピッキング:空気圧ロボットハンド: 3D形状ベースマッチング研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ヒトの代替として作業を行う自律ロボットの需要は世界の生産現場で高まっている。周囲の環境に応じてばら積みピッキングという高度な作業を自律ロボットに行わせるためには、外部情報の変化を検出する外界センサが必要となる。そこで、外界センサとしてレーザレンジファインダ(LRF)およびカメラを産業用ロボットに導入する。本研究では、LRFおよび2Dカメラの組み合わせによる低コストのばら積みピッキングシステムの構築を目的とする。ばら積み物体が設置された作業領域をLRFでスキャンし、その三次元形状を復元した後、2Dカメラによる3D形状ベースパターンマッチングを実行することでその位置・姿勢を特定し、空気圧ロボットハンドの特性を生かした把持作業を行う。使用用途、応用例等:このシステムの使用用途は、ごみ処理場におけるごみの自動分別作業や、生産現場におけるばら積み部品の自動選別作業等の、さまざまなばら積み物体の選別作業への適用である。従来のばら積みピッキングシステムは、高価なレーザや3Dカメラ、正確な位置算出技術を必要としていた。しかし、本システムが実現できれば、算出する三次元位置に多少の誤差を含んでも、空気圧ハンドの柔軟性を生かすことで、柔軟な把持作業が可能で、かつ低コストなばら積みピッキングシステムとなる。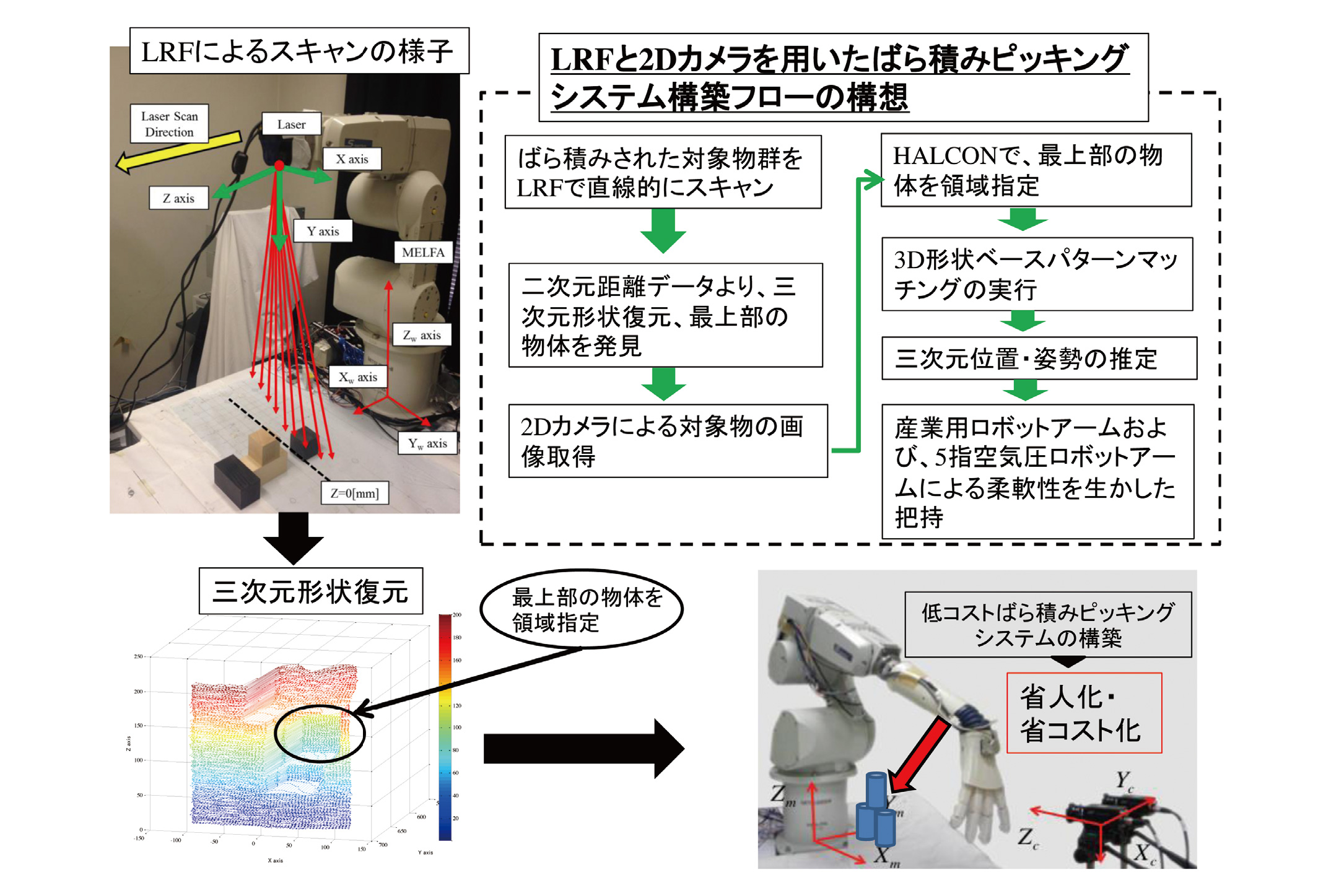 最適なゴルフクラブ提案のためのモード合成法を 用いたゴルフスイング挙動解析キーワード:マルチボディダイナミクス:慣性力: 有限要素法:シミュレーション: モード合成法研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ゴルフスイングのメカニズムの理解には、マルチボディダイナミクスの概念から、身体とゴルフクラブの相互作用を含んだ剛体リンクモデルにより調べられている。しかしながら、スイング中のゴルフクラブにはシャフト剛性の違いから生まれるしなりやねじり変形が伴い、この影響を無視できない。そのため、シャフト弾性を含んだゴルフクラブのシミュレーションモデルを構築する必要があり、有限要素法によりこれを作成する。また、モード合成法を適用しモデルの計算自由度を縮小し、多リンクモデルでの計算を考慮する。そして、手首の動きから発生する慣性力によりスイング中のシャフト挙動を解析し、このモデルの妥当性を検証する。使用用途、応用例等:様々なゴルファーのスイングを計測し、その動作でなされる手首の動きを求めることにより、弾性変形モデルからクラブの挙動を解析することが可能となる。さらに、シミュレーション上で様々なシャフト剛性を持つクラブで仮想スイングを行い、各々の打撃時におけるクラブヘッドの状態を解析する。そして、この解析結果から個々のゴルファーに適したシャフト剛性分布を決定しクラブの設計指針として応用可能である。備考:本シミュレーションモデルにより、三次元で高精度かつ高速な計算が可能となった。しかしながら、入力が含む誤差に解析結果の精度が依存するため、高精度な計測装置が必要となる。
最適なゴルフクラブ提案のためのモード合成法を 用いたゴルフスイング挙動解析キーワード:マルチボディダイナミクス:慣性力: 有限要素法:シミュレーション: モード合成法研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:ゴルフスイングのメカニズムの理解には、マルチボディダイナミクスの概念から、身体とゴルフクラブの相互作用を含んだ剛体リンクモデルにより調べられている。しかしながら、スイング中のゴルフクラブにはシャフト剛性の違いから生まれるしなりやねじり変形が伴い、この影響を無視できない。そのため、シャフト弾性を含んだゴルフクラブのシミュレーションモデルを構築する必要があり、有限要素法によりこれを作成する。また、モード合成法を適用しモデルの計算自由度を縮小し、多リンクモデルでの計算を考慮する。そして、手首の動きから発生する慣性力によりスイング中のシャフト挙動を解析し、このモデルの妥当性を検証する。使用用途、応用例等:様々なゴルファーのスイングを計測し、その動作でなされる手首の動きを求めることにより、弾性変形モデルからクラブの挙動を解析することが可能となる。さらに、シミュレーション上で様々なシャフト剛性を持つクラブで仮想スイングを行い、各々の打撃時におけるクラブヘッドの状態を解析する。そして、この解析結果から個々のゴルファーに適したシャフト剛性分布を決定しクラブの設計指針として応用可能である。備考:本シミュレーションモデルにより、三次元で高精度かつ高速な計算が可能となった。しかしながら、入力が含む誤差に解析結果の精度が依存するため、高精度な計測装置が必要となる。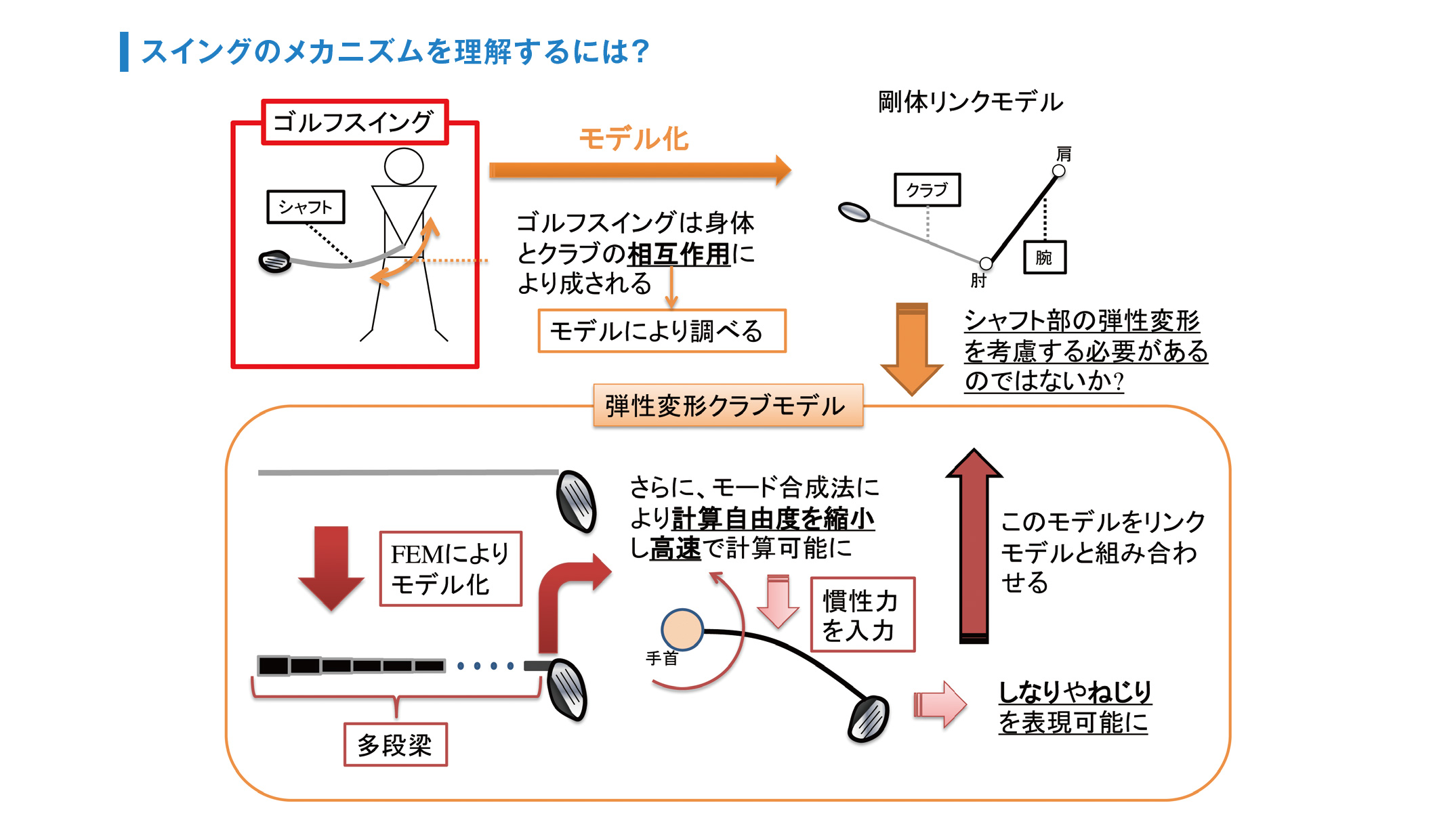 その他関連情報:参考文献:1) 岩壺 卓三、松久 寛、「振動工学の基礎」、森北出版株式会社、2008 2) 長松 昭男、「モード解析」、培風館、1985 3) 長松 昭男、大熊 政明、「部分構造合成法」、培風館、1991 4) 小松 敬治、「機械構造振動学MATLABによる有限要素法と応答解析」、森北出版株式会社、2009関節リウマチ母指MP関節亜脱臼の リハビリ動作計測キーワード:リハビリテーション:バイオメカニクス研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:関節リウマチは、現在根本的な治療法が確立されていない。治療法として、セラピストによるリハビリテーションがあるが、セラピストの不足や継続的治療の困難という問題が存在する。その解決策として、リハビリ用装置が開発され、この装置を改良するために、実際のリハビリの計測を試みた。計測にはモーションキャプチャーと指先力センサを使用している。反射マーカを患者に9個取り付け、患者の母指のリンクモデルと座標系を作成し、セラピスト側に付けたマーカで力の方向、センサで力の大きさを算出した。これを用いて、3次元での力のベクトル、作用点、リハビリ時の押し上げ量などが健常者で計測することができた。使用用途、応用例等:もともとの研究の始まりである、関節リウマチ母指亜脱臼のリハビリ装置の開発・改良を行うこと。3次元で実際に力の方向、作用点が得られることによって、人材が不足しているセラピストの教育に関してそれらを可視化させることで効率化が図れるのではないかと考えられる。
その他関連情報:参考文献:1) 岩壺 卓三、松久 寛、「振動工学の基礎」、森北出版株式会社、2008 2) 長松 昭男、「モード解析」、培風館、1985 3) 長松 昭男、大熊 政明、「部分構造合成法」、培風館、1991 4) 小松 敬治、「機械構造振動学MATLABによる有限要素法と応答解析」、森北出版株式会社、2009関節リウマチ母指MP関節亜脱臼の リハビリ動作計測キーワード:リハビリテーション:バイオメカニクス研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:関節リウマチは、現在根本的な治療法が確立されていない。治療法として、セラピストによるリハビリテーションがあるが、セラピストの不足や継続的治療の困難という問題が存在する。その解決策として、リハビリ用装置が開発され、この装置を改良するために、実際のリハビリの計測を試みた。計測にはモーションキャプチャーと指先力センサを使用している。反射マーカを患者に9個取り付け、患者の母指のリンクモデルと座標系を作成し、セラピスト側に付けたマーカで力の方向、センサで力の大きさを算出した。これを用いて、3次元での力のベクトル、作用点、リハビリ時の押し上げ量などが健常者で計測することができた。使用用途、応用例等:もともとの研究の始まりである、関節リウマチ母指亜脱臼のリハビリ装置の開発・改良を行うこと。3次元で実際に力の方向、作用点が得られることによって、人材が不足しているセラピストの教育に関してそれらを可視化させることで効率化が図れるのではないかと考えられる。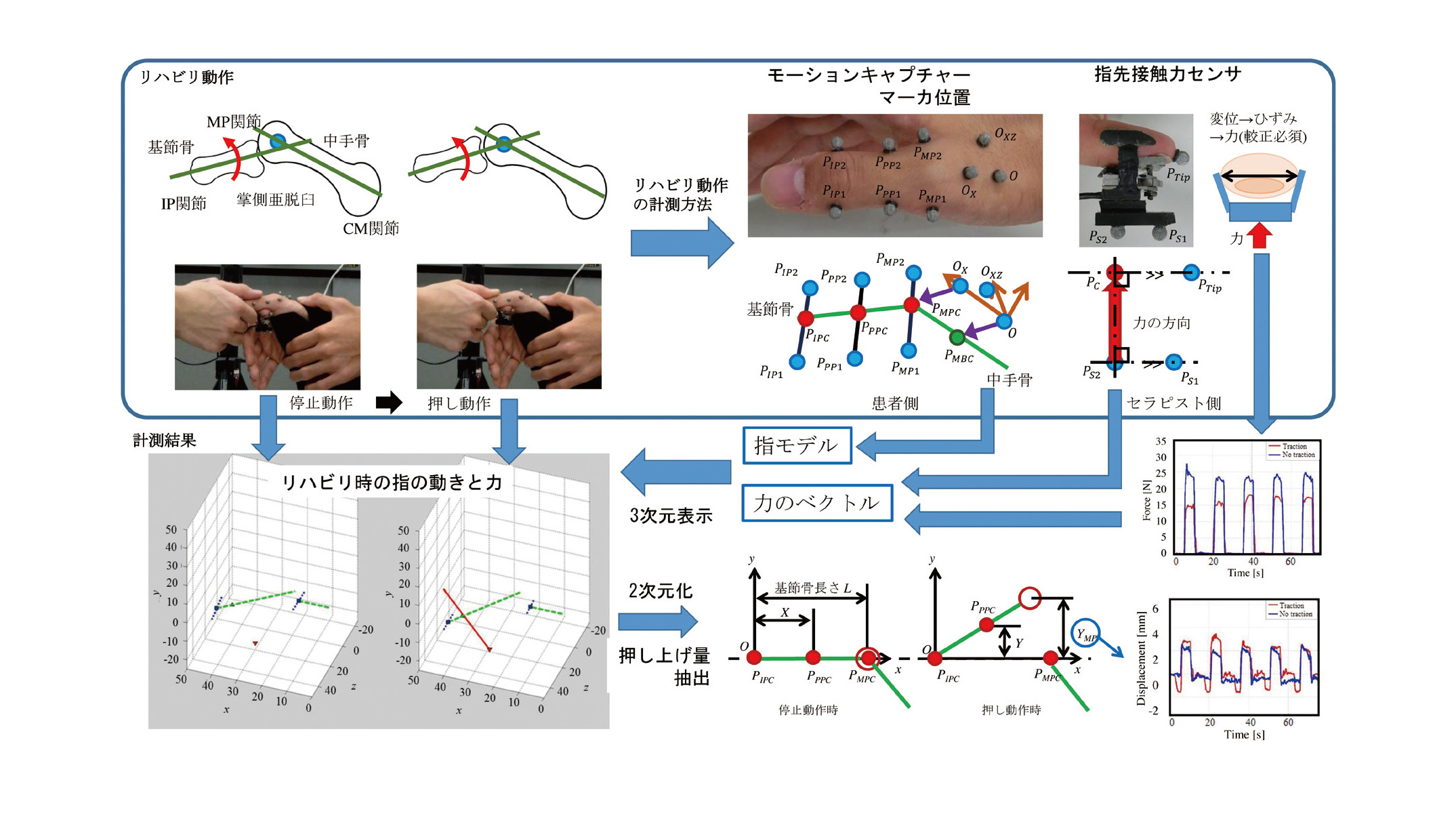 特許情報:特願2010-216525逆音響解析を用いて構築された音源モデルの 逆音響解析:境界要素法:筐体:音源モデル 妥当性と応用性の検証キーワード:逆音響解析:境界要素法:筐体:音源モデル研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年、ディーゼルエンジンを搭載した産業機械では、低騒音化の要求が高まっている。効率良い、騒音低減を実施するには、音源の特性を把握することが重要であり、様々な手法が用いられている。しかし、それらの手法は対象物に計測器を取付ける必要があり、エンジンなどの複雑な形状を持つ機械に応用することが困難であった。そこで、私たちは逆音響解析という、音源周囲の音圧を計測し、音源の表面振動を同定する手法を提案した。この手法では、対象物と非接触状態で音源の特性を把握することができる。本研究では、本手法でディーゼルエンジンの音源モデルを構築し、表面振動を同定する。さらに音源モデルと境界要素法を用いて周囲の騒音を予測し、音源モデルの妥当性と応用性を検証する。使用用途、応用例等:逆音響解析で算出された表面振動結果から、体積加速度を算出し、伝達経路解析を行うことで、騒音の寄与が高い箇所・経路を詳細に予測することができる。それによって、最低限の騒音対策を施すだけで、大幅な騒音低減を実施することが可能となる。備考:実際に、この手法を実用化するには、産業機械(コンバイン)のエンジンルームに近い条件化で、音源モデルを用いて周囲の騒音を予測し、精度を確認する必要がある。また、音源モデルを構築するまでの精度・効率の向上策を取り入れ、簡便化を図る。
特許情報:特願2010-216525逆音響解析を用いて構築された音源モデルの 逆音響解析:境界要素法:筐体:音源モデル 妥当性と応用性の検証キーワード:逆音響解析:境界要素法:筐体:音源モデル研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年、ディーゼルエンジンを搭載した産業機械では、低騒音化の要求が高まっている。効率良い、騒音低減を実施するには、音源の特性を把握することが重要であり、様々な手法が用いられている。しかし、それらの手法は対象物に計測器を取付ける必要があり、エンジンなどの複雑な形状を持つ機械に応用することが困難であった。そこで、私たちは逆音響解析という、音源周囲の音圧を計測し、音源の表面振動を同定する手法を提案した。この手法では、対象物と非接触状態で音源の特性を把握することができる。本研究では、本手法でディーゼルエンジンの音源モデルを構築し、表面振動を同定する。さらに音源モデルと境界要素法を用いて周囲の騒音を予測し、音源モデルの妥当性と応用性を検証する。使用用途、応用例等:逆音響解析で算出された表面振動結果から、体積加速度を算出し、伝達経路解析を行うことで、騒音の寄与が高い箇所・経路を詳細に予測することができる。それによって、最低限の騒音対策を施すだけで、大幅な騒音低減を実施することが可能となる。備考:実際に、この手法を実用化するには、産業機械(コンバイン)のエンジンルームに近い条件化で、音源モデルを用いて周囲の騒音を予測し、精度を確認する必要がある。また、音源モデルを構築するまでの精度・効率の向上策を取り入れ、簡便化を図る。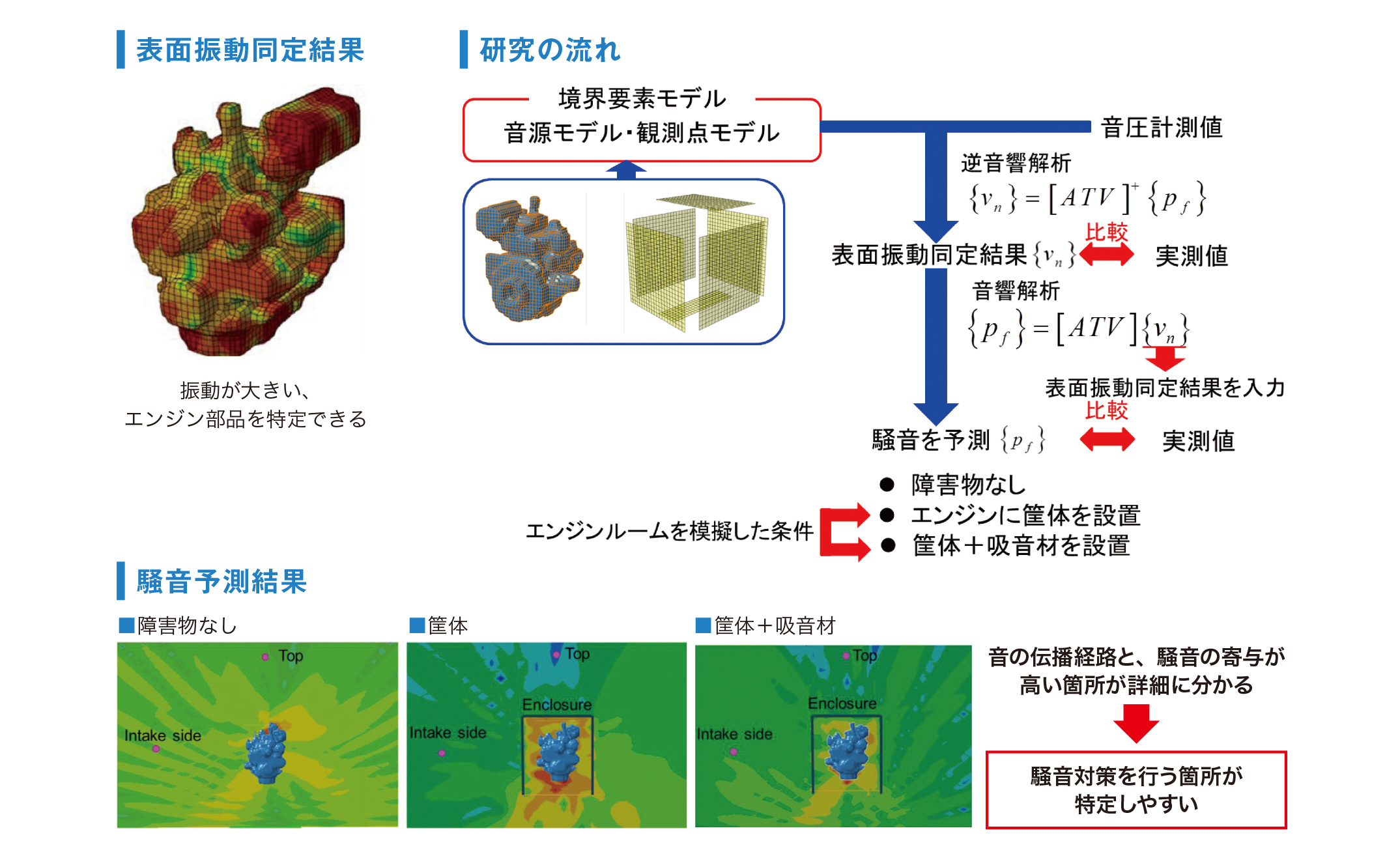 筋電信号による動作識別手法の開発キーワード:筋電信号:筋電義手:動作識別:超球モデル研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:手や指は、日常生活を支える最も重要な部分を担っている。多くの上肢切断者はそれぞれの目的に合わせた様々な義手を使用している。その中で、筋電義手は見栄えがよく、筋電信号を制御入力とするため動作時の姿勢に制約がないことから大変注目されている。我々が提案している超球モデルを使用した動作識別手法は、短時間で学習が可能で、肘動作を全く誤識別せずに、手の開き、握り、摘み、手首の伸展、屈曲、手首の回内、回外の7動作について高い精度で識別でき、リアルタイムとされる300ms以下での識別が可能である。しかし、上肢切断者の生活の水準を高めるため、動作数の不足や筋電信号の時間変化に対応することなど様々な課題がある。そこで、今後はそれらを考慮した識別手法の開発を行っていく。使用用途、応用例等:上肢切断者が使用する筋電義手の動作識別システムでの使用。備考:筋電信号の時間変化に対しても高精度な識別精度を維持すること。
筋電信号による動作識別手法の開発キーワード:筋電信号:筋電義手:動作識別:超球モデル研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:手や指は、日常生活を支える最も重要な部分を担っている。多くの上肢切断者はそれぞれの目的に合わせた様々な義手を使用している。その中で、筋電義手は見栄えがよく、筋電信号を制御入力とするため動作時の姿勢に制約がないことから大変注目されている。我々が提案している超球モデルを使用した動作識別手法は、短時間で学習が可能で、肘動作を全く誤識別せずに、手の開き、握り、摘み、手首の伸展、屈曲、手首の回内、回外の7動作について高い精度で識別でき、リアルタイムとされる300ms以下での識別が可能である。しかし、上肢切断者の生活の水準を高めるため、動作数の不足や筋電信号の時間変化に対応することなど様々な課題がある。そこで、今後はそれらを考慮した識別手法の開発を行っていく。使用用途、応用例等:上肢切断者が使用する筋電義手の動作識別システムでの使用。備考:筋電信号の時間変化に対しても高精度な識別精度を維持すること。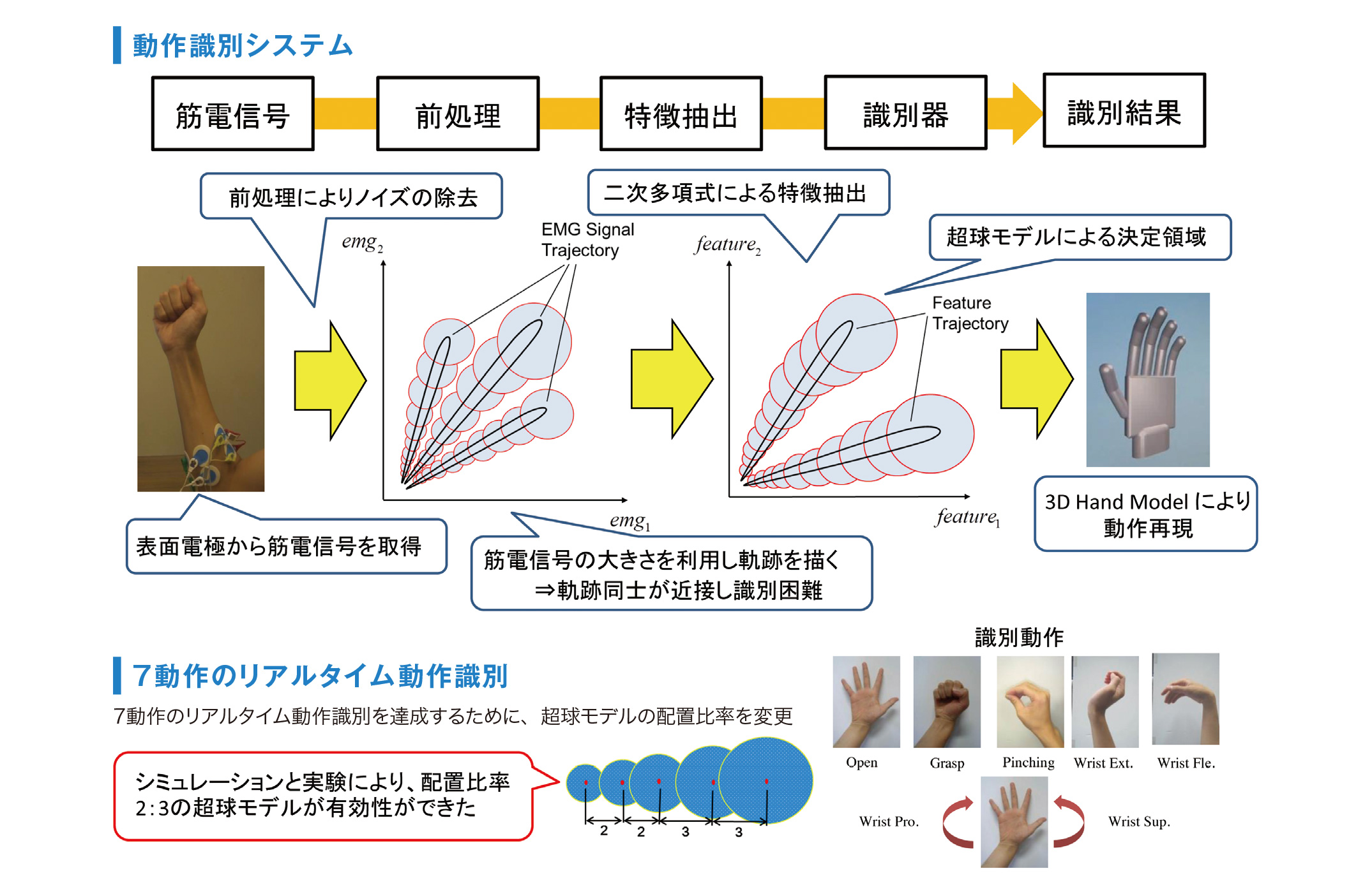 空気圧アクチュエータ駆動のロボットハンドによる マニピュレーションシステムの開発キーワード:空気圧アクチュエータ:操り制御: 把持:モデリング研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:人と接する環境におけるロボット技術の適用には、高い安全性が求められる。空気圧アクチュエータを駆動源に用いた能動義手や介護ロボットなどは、安全性を満たす可能性を有している。しかし、空気圧アクチュエータは、ヒステリシスなどの非線形性により、単純な作業を行うロボットにしか適用されていない。そこで、空気圧アクチュエータを駆動源としたロボットによるマニピュレーションシステムの構築を目指している。使用用途、応用例等:能動義手や福祉機器のエンドエフェクタとして使用。
空気圧アクチュエータ駆動のロボットハンドによる マニピュレーションシステムの開発キーワード:空気圧アクチュエータ:操り制御: 把持:モデリング研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:人と接する環境におけるロボット技術の適用には、高い安全性が求められる。空気圧アクチュエータを駆動源に用いた能動義手や介護ロボットなどは、安全性を満たす可能性を有している。しかし、空気圧アクチュエータは、ヒステリシスなどの非線形性により、単純な作業を行うロボットにしか適用されていない。そこで、空気圧アクチュエータを駆動源としたロボットによるマニピュレーションシステムの構築を目指している。使用用途、応用例等:能動義手や福祉機器のエンドエフェクタとして使用。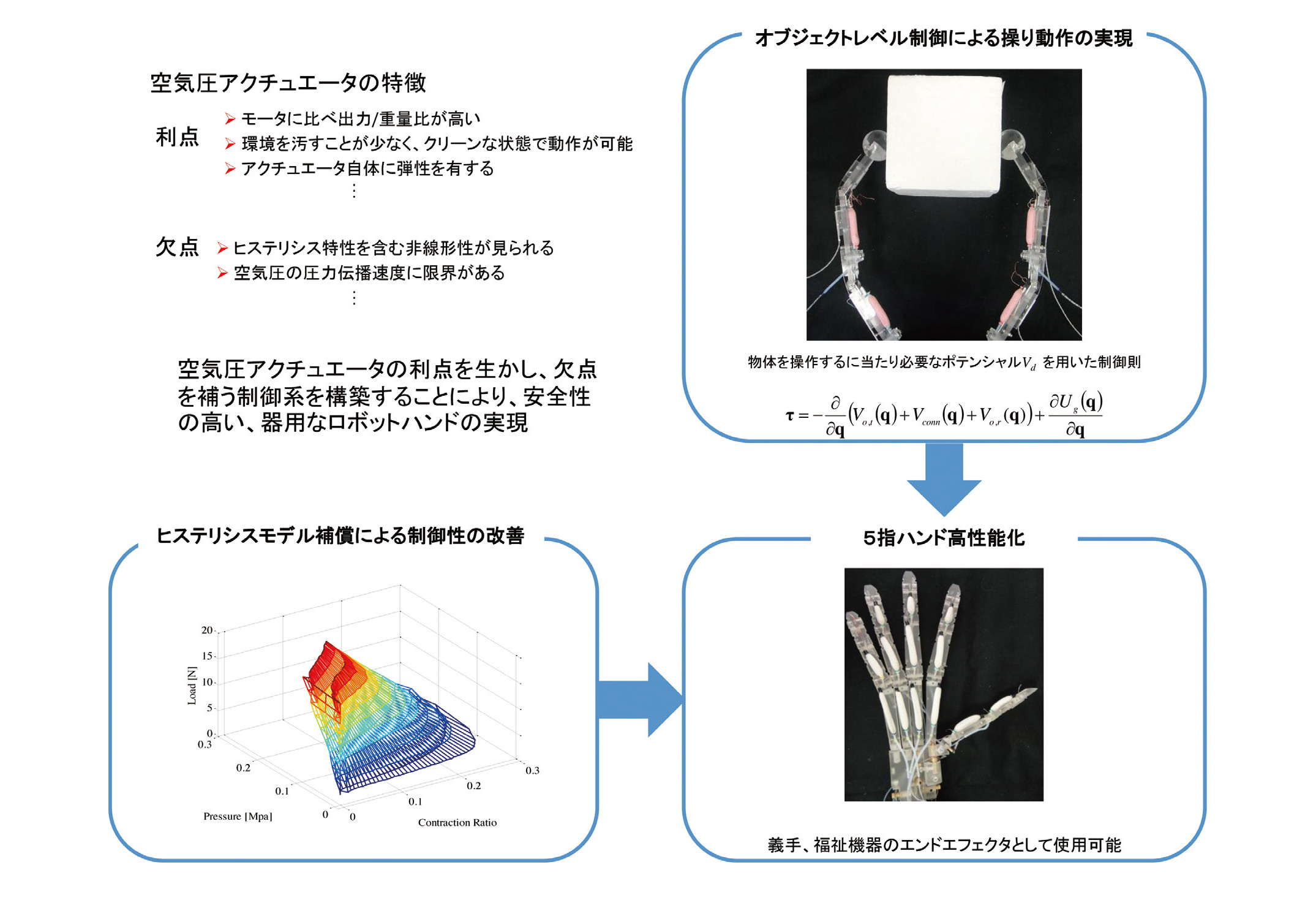 特許情報:特願2005-309110, 特願2007-089962歩行者モデルを用いた避難シミュレーションキーワード:粒子:最適速度関数:パニック状態研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年、地震などの災害発生時に建物内にいる人々が渋滞・衝突を起こしてしまい、避難することが困難な状況が多く見られている。渋滞・混雑を低減する為には、避難時における交通流解析を行うことが必要である。近年では、交通流を解析する研究が様々な手法で行われている。しかし、避難時特有の状態をもつ避難者に着目した研究は十分解析されていない。そこで、本研究では対象となる歩行者を粒子で表現し、避難時に陥るパニック状態を定量的に評価出来る最適速度関数を用いて、粒子を移動させ実際の避難時の状態を詳細に表現し、解析する。使用用途、応用例等:避難時における交通流解析。備考:粒子数を増加させ、混雑を生じさせ、その上でスムーズな避難を行うために案内板の設定。
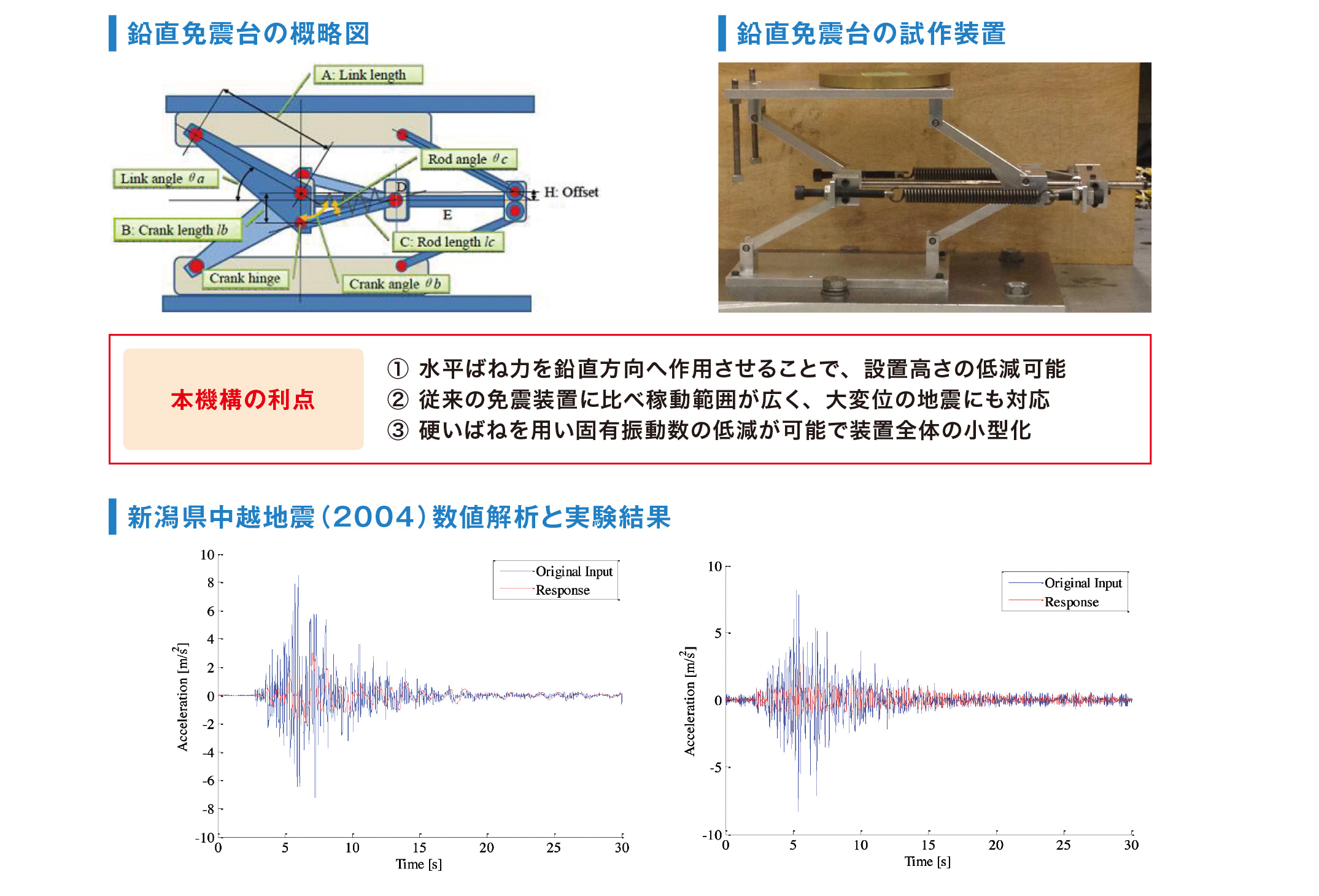
特許情報:特願2005-309110, 特願2007-089962歩行者モデルを用いた避難シミュレーションキーワード:粒子:最適速度関数:パニック状態研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:近年、地震などの災害発生時に建物内にいる人々が渋滞・衝突を起こしてしまい、避難することが困難な状況が多く見られている。渋滞・混雑を低減する為には、避難時における交通流解析を行うことが必要である。近年では、交通流を解析する研究が様々な手法で行われている。しかし、避難時特有の状態をもつ避難者に着目した研究は十分解析されていない。そこで、本研究では対象となる歩行者を粒子で表現し、避難時に陥るパニック状態を定量的に評価出来る最適速度関数を用いて、粒子を移動させ実際の避難時の状態を詳細に表現し、解析する。使用用途、応用例等:避難時における交通流解析。備考:粒子数を増加させ、混雑を生じさせ、その上でスムーズな避難を行うために案内板の設定。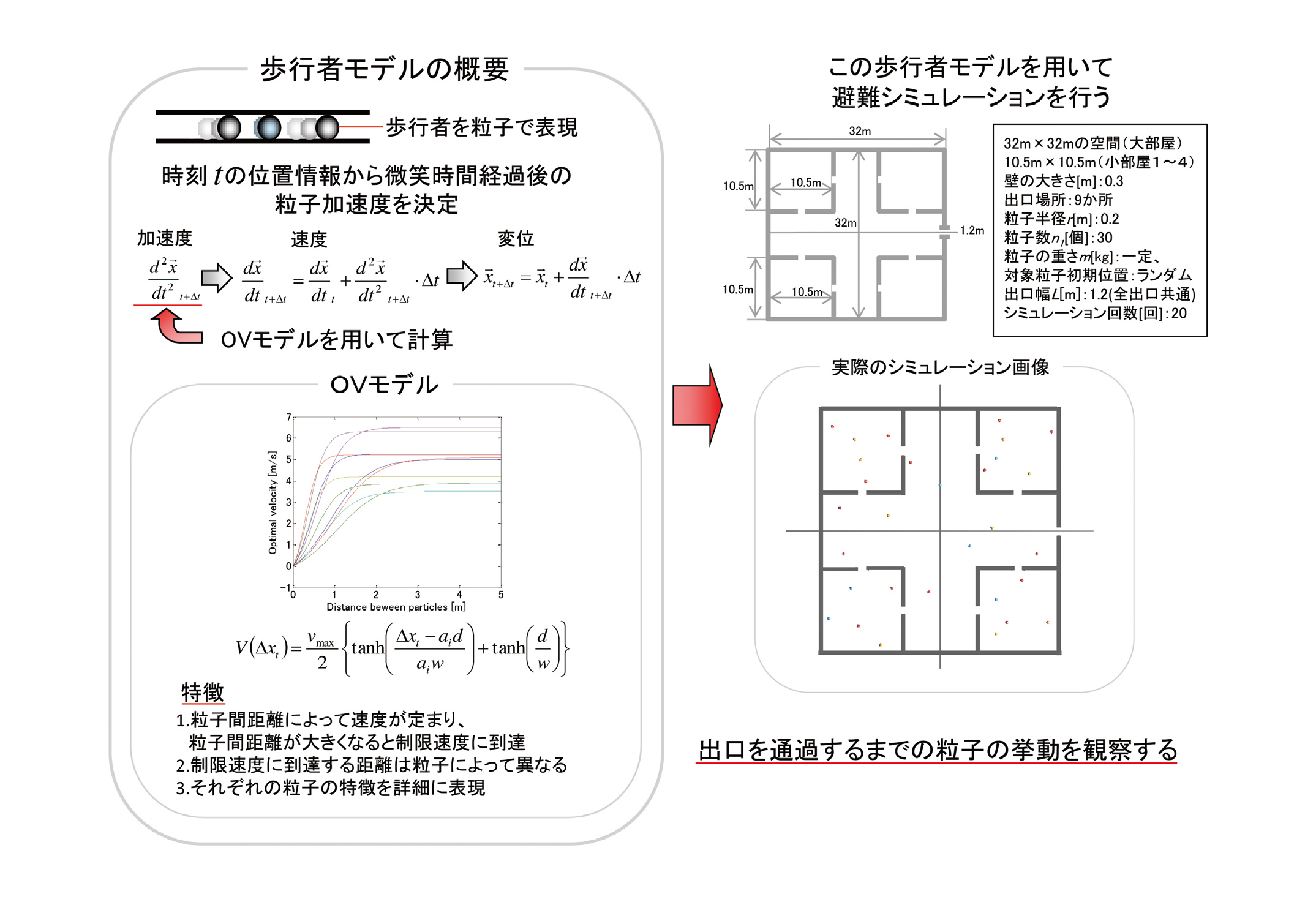 リンククランク機構を用いた 鉛直免震台に関する研究キーワード:鉛直方向免震:地震:運動方程式研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:既存している免震台の多くは水平方向のみ免震し、鉛直方向には免震しない。しかし、2004年に発生した新潟県中越地震のように鉛直方向の揺れが大きい地震も報告されており、鉛直方向に対応し、かつコストも少ない免震台が求められている。本研究では、リンクとクランク機構を導入し、硬いばねを用いてばねの伸縮量を小さくすることで免震台の小型化を図りつつ、見かけ上のばね定数が小さく固有振動数を低減できる鉛直免震台を提案した。この鉛直免震台は水平方向のばねのみで鉛直方向の負荷の支持が可能な機構となっている。これにより、稼働ストロークも大きくかつ設置高さも低くできた。さらに、ばねの初期張力の調節が可能で、様々な負荷荷重に対応できる。使用用途、応用例等:この鉛直免震台の使用用途は美術品、文化財、精密機器などを保護するために開発されている。応用例としては、実際に2004年に発生した新潟県中越地震を入力し、加振試験を行った結果は応答加速度が約1/3程度にまで大きく抑えられた。また、東北地方太平洋地震や宮城県北部地震などの5種類の地震を加振試験の低減率の平均値は0.30倍となった。十分な免震効果があることができた。
リンククランク機構を用いた 鉛直免震台に関する研究キーワード:鉛直方向免震:地震:運動方程式研究テーマの分野:機械・ものづくり・計測機器関連研究者所属・研究者名:理工学部 エネルギー機械工学科、辻内 伸好:伊藤 彰人概要:既存している免震台の多くは水平方向のみ免震し、鉛直方向には免震しない。しかし、2004年に発生した新潟県中越地震のように鉛直方向の揺れが大きい地震も報告されており、鉛直方向に対応し、かつコストも少ない免震台が求められている。本研究では、リンクとクランク機構を導入し、硬いばねを用いてばねの伸縮量を小さくすることで免震台の小型化を図りつつ、見かけ上のばね定数が小さく固有振動数を低減できる鉛直免震台を提案した。この鉛直免震台は水平方向のばねのみで鉛直方向の負荷の支持が可能な機構となっている。これにより、稼働ストロークも大きくかつ設置高さも低くできた。さらに、ばねの初期張力の調節が可能で、様々な負荷荷重に対応できる。使用用途、応用例等:この鉛直免震台の使用用途は美術品、文化財、精密機器などを保護するために開発されている。応用例としては、実際に2004年に発生した新潟県中越地震を入力し、加振試験を行った結果は応答加速度が約1/3程度にまで大きく抑えられた。また、東北地方太平洋地震や宮城県北部地震などの5種類の地震を加振試験の低減率の平均値は0.30倍となった。十分な免震効果があることができた。